À présent que vous avez choisi ou conçu un châssis UAV, et choisi les moteurs, hélices, ESC et batteries appropriés, vous pouvez commencer à sélectionner un contrôleur de vol. Un contrôleur de vol pour un UAV multi-rotors est un circuit intégré généralement composé d'un microprocesseur, de capteurs et de broches d'entrée/sortie. Une fois déballé, un contrôleur de vol ne connait pas par magie le type ou la configuration de votre drone spécifique, c'est pourquoi vous devez définir certains paramètres dans un logiciel et, une fois cela fait, cette configuration est ensuite transférée sur la carte. Plutôt que de comparer les contrôleurs de vol qui sont actuellement disponibles, l'approche que nous avons adoptée ici répertorie quelles caractéristiques desservent quelles fonctions, ainsi que les aspects à rechercher.
Processeur principal
Les 8051/ AVR/ PIC/ ARM : ces familles de microcontrôleurs constituent la base de la plupart des contrôleurs de vol actuels. Arduino est à base d'AVR (ATmel) et la communauté semble se focaliser sur MultiWii comme code préféré. Microchip est le principal fabricant des puces PIC. Il est difficile d'affirmer que l'un est meilleur que l'autre, et cela tient vraiment à ce que le logiciel peut faire. L'ARM (STM32 par exemple) utilise l'architecture en 16/32 bits, alors que l'AVR et le PIC tendent à utiliser du 8/16 bits (décrit ci-dessous). Comme les ordinateurs monocarte sont de moins en moins chers, attendez-vous à découvrir une nouvelle génération de contrôleurs de vol pouvant tourner sous différents systèmes d'exploitation complets tels que Linux ou Android. Processeur : ceux-ci sont généralement des multiples de huit (8 bits, 16 bits, 32 bits, 64 bits) et constituent une référence à la taille des registres primaires dans un processeur. Les microprocesseurs ne peuvent traiter qu'un certain nombre (maximum) de bits en mémoire à la fois. Plus un microcontrôleur peut gérer de bits, plus le traitement sera précis (et rapide). Par exemple, traiter une variable de 16 bits sur un processeur 8 bits n'est pas judicieux, alors que sur un processeur 32 bits, cela est très rapide. Veuillez noter que le code doit également travailler avec le bon nombre de bits et, qu'au moment de la rédaction de cet article, très peu de programmes utilisent un code optimisé pour du 32 bits.
 Microcontrôleur
MicrocontrôleurFréquence opérationnelle : la fréquence à laquelle travaille le processeur principal. La fréquence est mesurée en « Hertz » (cycles par seconde). On l'appelle plus généralement la « fréquence d'horloge ». Plus la fréquence opérationnelle est élevée, plus la gestion des données est rapide. Mémoire Flash/Programme : On retrouve essentiellement la mémoire flash là où le code principal est stocké. Si le programme est complexe, il peut nécessiter pas mal d'espace. Évidemment, plus la mémoire est grande, plus elle peut stocker d'informations. La mémoire est également utile pour le stockage de données de vol telles que des coordonnées GPS, des plans de vol, des mouvements automatisés de caméras etc. Le code chargé dans la mémoire flash reste sur la puce, même si son courant est coupé. Mémoire SRAM : SRAM signifie « Static Random-Access Memory » (mémoire vive statique), il s'agit de l'espace sur la puce qui est utilisé lors des calculs. Les données stockées sur la mémoire RAM sont perdues lorsque le courant est coupé. Plus la mémoire RAM est importante, plus l'information sera « facilement disponible » à tout moment donné pour le calcul. Mémoire EEPROM : la mémoire EEPROM (Electrically-Erasable Programmable Read-Only Memory ou mémoire morte effaçable électriquement et programmable) sert habituellement à stocker des informations qui ne change pas en vol, tels que les paramètres, contrairement aux données stockées dans la mémoire SRAM qui peuvent se rapporter à des données d'un capteur, etc. Broches E/S supplémentaires : la plupart des microcontrôleurs ont beaucoup de broches d'entrée/sortie numériques et analogiques et, sur un contrôleur de vol, certaines sont utilisées par les capteurs, d'autres pour la communication, et certaines restent disponibles pour des entrées/sorties d'ordre général. Ces broches supplémentaires peuvent être connectées à des servomoteurs RC, des systèmes de cardan, des alarmes sonores et bien plus encore. Convertisseur A/N : Si les capteurs utilisés sur la carte émettent une tension analogique (généralement de 0 à 3,3 V ou 0 à 5 V), le convertisseur analogique/numérique doit traduire ces lectures en données numériques. Tout comme pour le processeur, le nombre de bits pouvant être traité par le convertisseur A/N détermine la précision maximale. Il faut ajouter à cela la fréquence à laquelle le microprocesseur peut lire les données (nombre de fois par seconde) pour tenter de garantir qu'aucune information n'est perdue. Il est néanmoins difficile de ne pas perdre de données au cours de cette conversion, donc plus la conversion A/N est importante, plus les lectures sont précises, mais il est important que le processeur puisse gérer la vitesse à laquelle l'information est envoyée.
Alimentation
| Il existe souvent deux gammes de tension décrites dans la fiche technique d'un contrôleur de vol, la première étant la gamme de tension en entrée du régulateur de vol lui-même (la plupart fonctionnent à une puissance nominale de 5 V), et la seconde étant la gamme de tension en entrée de la logique du microprocesseur principal (par exemple : 3,3 ou 5 V) Étant donné que le contrôleur de vol est une unité relativement intégrée, vous avez vraiment besoin de faire attention à la gamme de tension en entrée pour le contrôleur de vol lui-même. La plupart des contrôleurs de vol des aéroplanes multi-rotors fonctionne en 5 V puisque telle est la tension fournie par un Circuit d'élimination de batterie (BEC) (reportez-vous à la leçon 3 pour plus d'informations). À nouveau, idéalement vous ne devriez pas alimenter le contrôleur de vol séparément de la batterie principale. La seule exception est pour le cas où vous souhaitez une batterie de secours pour le cas où la batterie principale tire tant de puissance que le BEC ne peut plus fournir assez de courant/tension, provoquant une baisse de tension/réinitialisation. Cependant, plutôt qu'une batterie de secours, on utilise plus souvent des condensateurs. |
 Alimentation Alimentation |
Capteurs
Sur le plan matériel, un contrôleur de vol est essentiellement un microcontrôleur programmable normal, mais qui dispose de capteurs embarqués. Au strict minimum, un contrôleur de vol comprendra un gyroscope à trois axes, mais ne sera alors pas en mesure de gérer la mise à niveau automatique. Tous les contrôleurs de vol n'intègrent pas tous les capteurs ci-dessous et peuvent n'inclure qu'une combinaison de ceux-ci. Les capteurs
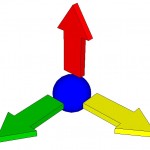 Axes d'un accéléromètre Axes d'un accéléromètre |
Accéléromètre
Comme leur nom l'indique,les accéléromètres mesurent l'accélération linéaire sur les trois axes (appelons-les X, Y et Z). Les unités s'expriment généralement en « gravité » (G) qui représente 9,81 m/s², ou 32 pieds/s². La sortie d'un accéléromètre peut être intégrée deux fois pour envoyer une position, mais en raison de pertes dans l'émission, elle est soumise à une « dérive ». Une caractéristique très importante des accéléromètres à trois axes est qu'ils détectent la gravité et, en tant que tel, peuvent donc savoir dans quelle direction se trouve le « bas ». Cela joue un rôle majeur, puisqu'il permet à un aéronef multi-rotors de rester stable. L'accéléromètre doit être monté sur le contrôleur de vol de façon à ce que les axes linéaires s'alignent avec les axes principaux de l'UAV. |
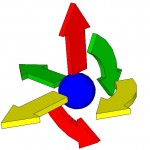
 Axes d'un gyroscope Axes d'un gyroscope |
Gyroscope
Un gyroscope mesure le taux de variation angulaire sur jusqu'à trois axes angulaires (appelons-les alpha, bêta et gamma). Les unités sont souvent en degrés par seconde. Veuillez noter qu'un gyroscope ne mesure pas directement les angles absolus, mais vous pouvez répéter pour obtenir l'angle qui, tout comme pour un accéléromètre, est sujet à la dérive. La sortie d'un gyroscope actuel est généralement analogique ou I2C, mais dans la plupart des cas, vous n'avez pas à vous en inquiéter car cela est géré par le code du contrôleur de vol. Le gyroscope doit être monté de sorte que ses axes de rotation s'alignent avec les axes de l'UAV. |
 Axes d'un IMU 6 Axes d'un IMU 6 |
Centrale à inertie (IMU)
Une IMU se compose pour l'essentiel d'une petite carte qui contient à la fois un accéléromètre et un gyroscope (normalement ce sont des multi-axes). La plupart contiennent un accéléromètre à trois axes et un gyroscope à trois axes, et d'autres peuvent contenir des capteurs supplémentaires tels qu'un magnétomètre à trois axes, pour un total de 9 axes de mesure. |
 Boussole Boussole |
Boussole/Magnétomètre
Une boussole magnétique électronique est capable de mesurer le champ magnétique de la terre et de l'utiliser pour déterminer la direction à la boussole d'un drone (par rapport au nord magnétique). Ce capteur est presque toujours présent si le système dispose d'une entrée GPS, et est disponible en version de un à trois axes. |
 Pression atmosphérique Pression atmosphérique |
Pression/Baromètre
Comme la pression atmosphérique change à mesure que vous vous éloignez du niveau de la mer, un capteur de pression peut être utilisé pour vous donner une lecture assez précise de l'altitude de l'UAV. La plupart des contrôleurs de vol reçoivent à la fois des données d'altitude du capteur de pression et du GPS pour calculer de la façon la plus précise l'altitude par rapport au niveau de la mer. Veuillez noter qu'il est préférable que le baromètre soit recouvert d'un morceau de mousse afin de diminuer les effets du vent sur la puce. |
 Satellites GPS Satellites GPS |
GPS
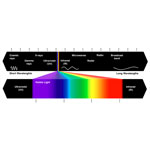
Les Systèmes de positionnement mondial (GPS) utilisent les signaux envoyés par un certain nombre de satellites en orbite autour de la Terre afin de déterminer leur emplacement géographique spécifique. Un contrôleur de vol peut disposer soit d'un GPS intégré, soit d'un modèle relié par un câble. L'antenne GPS ne doit pas être confondue avec la puce GPS elle-même, et peut ressembler à une petite boîte noire ou une antenne normale de type « canard ». Afin d'obtenir un verrouillage GPS précis, la puce GPS doit recevoir des données provenant de plusieurs satellites, et plus ils sont nombreux, mieux c'est. |
 Distance Distance |
Distance
Les capteurs de distance sont de plus en plus utilisés sur les drones puisque les coordonnées GPS et les capteurs de pression seuls ne peuvent pas vous dire à quelle distance de la terre vous vous trouvez (pensez aux collines, montagnes ou bâtiments) ou si vous allez heurter un objet. Un capteur de distance orienté vers le bas peut être basé sur une technologie ultrasonique,laser ou lidar (les infrarouges présentent des problèmes à la lumière du soleil). Très peu de contrôleurs de vol comprennent des capteurs de distance dans le cadre d'un kit standard. |
Modes de vol
Voici une liste des modes de vol les plus populaires, mais tous ne sont pas disponibles sur tous les contrôleurs de vol. Un « mode de vol » est la façon dont le contrôleur de vol utilise des entrées de capteurs et RC afin de faire voler et de stabiliser l'avion. Si vous disposez d'un émetteur doté de cinq canaux ou plus, vous pouvez être en mesure de configurer le logiciel pour vous permettre de changer le mode de vol via le 5e canal (interrupteur auxiliaire) durant le vol. Chaque mode est précisé ci-dessous.
| Mode |
Gyroscope |
Accéléromètre |
Baromètre |
Boussole |
GPS |
Remarques |
| ACRO/Gyroscope uniquement |
-X- |
|
|
|
|
Un mode généralement par défaut et son vol plus « acrobatique » (le drone ne peut faire de la mise à niveau automatique) |
| ANGLE (Stable/Niveau/Accéléromètre) |
-X- |
-X- |
|
|
|
Mode stable ; va essayer de maintenir le niveau du modèle par rapport au sol (mais pas à une position fixe). |
| HORIZON |
-X- |
|
|
|
|
Combine l'effet stable avec des commandes et des acrobaties RC lentes et avec des commandes RC rapides. |
| BARO (Maintien de l'altitude) |
-X- |
-X- |
-X- |
|
|
Le baromètre est utilisé afin de conserver une certaine hauteur (fixée) lorsqu'aucune autre commande n'est reçue. |
| MAG (Tenue du cap) |
-X- |
-X- |
|
-X- |
|
Mode verrouillage de cap (direction à la boussole), pour essayer de maintenir son orientation en lacet. |
| HEADFREE (CareFree/ orientation indépendante du déplacement) |
-X- |
-X- |
|
-X- |
|
Maintient l'orientation (lacet) du drone et se déplace toujours dans la même direction 2D pour le même mouvement du manche en ROULIS/TANGAGE. |
| GPS/ Retour à la base |
-X- |
-X- |
|
-X- |
-X- |
Utilise automatiquement une boussole et un GPS pour rentrer à la base, au point de départ GPS. |
| GPS/ Points de passage |
-X- |
-X- |
|
-X- |
-X- |
Suit automatiquement les points de cheminement GPS pré-configurés de manière autonome. |
| GPS/ Maintien de position |
-X- |
-X- |
|
-X- |
-X- |
Maintient la position actuelle en utilisant le GPS et le baromètre (si disponible). |
| Sécurité intégrée |
-X- |
|
|
|
|
L'avion revient au mode ACRO/GYRO uniquement quand aucun des autres modes n'est sélectionné. |
Logiciel
Réglages et boucle de contrôle PID
Un correcteur Proportionnel intégral dérivé (PID) vous permet de changer les caractéristiques de vol du drone, y compris la façon dont il réagit à une entrée utilisateur, comment et à quelle vitesse il se stabilise et bien plus encore. Les paramètres PID et la façon dont le logiciel utilise les diverses entrées des capteurs sont incroyablement importants, mais cela n'est pas trop utile si on ne regarde et ne comprend pas le code qui dicte cela, lorsque l'on compare les contrôleurs de vol. Les fabricants qui produisent des kits « prêt à voler » sont en mesure d'affiner les réglages PID et les équations pour leur plate-forme spécifique, ce qui explique pourquoi la plupart des multi-rotors RTF volent très bien dès leur sortie de l'emballage. Les constructeurs de drones personnalisés doivent toutefois utiliser des contrôleurs de vol qui sont conçus pour s'adapter à presque tous les types d'aéronefs multi-rotors, et comme tel il appartient à l'utilisateur final d'ajuster les valeurs jusqu'à ce qu'il soit satisfait des caractéristiques de vol. |
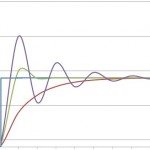 Graphique PID Graphique PID |
GUI
Une GUI (Interface graphique utilisateur) est ce qui est utilisé pour éditer visuellement le code (via un ordinateur) qui sera téléchargé sur le contrôleur de vol. Le logiciel fourni avec les contrôleurs de vol continue à s'améliorer ; les premiers contrôleurs de vol du marché utilisaient largement des interfaces à base de texte qui exigeaient que vous compreniez la quasi-totalité du code et modifiez des sections spécifiques en fonction de votre projet. Les GUI les plus récentes des contrôleurs de vol utilisent des interfaces graphiques interactives pour vous aider à configurer les paramètres nécessaires. |
 GUI Quadrino GUI Quadrino |
Caractéristiques complémentaires
Le logiciel utilisé sur certains contrôleurs de vol peut avoir des fonctionnalités supplémentaires qui ne sont pas disponibles sur les autres. Votre choix d'un contrôleur de vol spécifique peut finalement dépendre des caractéristiques/fonctionnalités supplémentaires offertes. Ces caractéristiques peuvent inclure :
- Une navigation autonome par points de passage, qui vous permet de régler les point de passage GPS que va suivre le drone de façon autonome
- La « Mise en orbite », c'est-à-dire se déplacer autour de coordonnées GPS fixées, avec l'avant du drone toujours pointé vers les coordonnées (utile pour le tournage de films)
- « Suivez-moi » : certains drones ont une option « Suivez-moi » qui peut être basée sur du GPS (par exemple le suivi des coordonnées GPS d'un Smartphone)
- Imagerie 3D : la plupart des imageries 3D se font après un vol en utilisant des images capturées pendant le vol et des données GPS
- « Source libre » : le logiciel associé à certains contrôleurs de vol ne peut pas être modifié/personnalisé. Les produits en source libre permettent généralement aux utilisateurs avancés de modifier le code en fonction de leurs besoins spécifiques.
|
 Terrain 3D Terrain 3D |
Communication
 Émetteur RC Hitec Émetteur RC Hitec Émetteur RC Spektrum Émetteur RC Spektrum |
Télécommande d'aéromodélisme (RC)
Une communication par Télécommande d'aéromodélisme (RC) implique généralement un émetteur et un récepteur RC portatif (de loisir). Pour les UAV, vous avez besoin d'un minimum de quatre canaux, et on vous en conseille plus, même s'ils ne sont pas tous utilisés. Ces canaux sont généralement associés à :
- Tangage (qui se traduit par un mouvement d'avant en arrière)
- Élévation (se rapprocher ou s'éloigner du sol)
- Lacet (rotation dans le sens normal ou inverse des aiguilles d'une montre)
- Roulis (mouvement latéral à gauche et à droite)
Les canaux restant peuvent être utilisés pour ce qui suit
- Armer/désarmer les moteurs
- Commandes de cardan (panoramique haut/bas, rotation horaire/anti-horaire, zoom)
- Changer les modes de vol (mode acrobatique, mode stabilisé, etc.)
- Activer/déployer une charge utile, un parachute, un avertisseur sonore ou un autre dispositif
- De nombreuses autres utilisations
La plupart des pilotes de drones préfèrent des commandes portatives, c'est à dire que les systèmes RC sont toujours le premier choix en matière de commande d'un UAV. Le récepteur, par lui-même, relaie simplement les valeurs saisies dans le contrôleur et, comme tel, ne peut pas contrôler un UAV. Le récepteur doit être connecté au contrôleur de vol, qui doit être programmé pour recevoir les signaux RC. Il existe très peu de contrôleurs de vol sur le marché qui n'acceptent pas directement une entrée RC depuis un récepteur, et la plupart alimentent même le récepteur à partir de l'une de leurs broches. Autres points à prendre en compte lors du choix d'une télécommande :
- Tous les émetteurs RC ne peuvent pas proposer une plage complète de signaux RC de 500 à 2500 ms ; Certains la limitent artificiellement puisque la plupart des applications RC sont pour des voitures, avions et hélicoptères RC
- La portée/ portée maximale sans fil (en pieds ou en mètres) d'un système RC n'est presque jamais fournie par les fabricants, car elle implique de nombreux facteurs tels que les obstacles, la température, l'humidité, la puissance de la batterie et bien plus encore.
- Certains systèmes RC disposent d'un récepteur ayant également un émetteur intégré pour transmettre des données de capteurs (coordonnées GPS par exemple) présentées sur l'écran LCD de l'émetteur RC.
|
 Bluetooth Bluetooth |
Bluetooth
Les produits Bluetooth, et BLE (Bluetooth basse consommation), plus récent, étaient à l'origine destinés à être utilisés pour transférer des données entre des appareils sans la complexité d'appariement ou de correspondance des fréquences. Certains contrôleurs de vol du marché peuvent envoyer et recevoir des données sans fil par l'intermédiaire d'une connexion Bluetooth, ce qui facilite la résolution des problèmes sur le terrain. |
 WiFi WiFi |
WiFi
Une commande WiFi se fait généralement au moyen d'un routeur, ordinateur (portable, de bureau ou tablette) ou Smartphone WiFi. Le WiFi est en mesure de gérer aussi bien la transmission de données que la transmission d'images, mais il est beaucoup plus difficile à paramétrer et à mettre en service. Pour tous les systèmes WiFi, la portée est limitée par celle de l'émetteur WiFi. |
 Fréquence radio Fréquence radio |
Fréquence Radio (RF)
Une commande par Fréquence radio (RF) fait ici référence à l'envoi de données sans fil depuis un ordinateur ou un microcontrôleur à un avion utilisant un émetteur/récepteur RF (ou un émetteur/récepteur à deux voies). L'utilisation d'une unité RF normale connectée à un ordinateur permet une communication bidirectionnelle à longue distance avec une « densité » élevée des données (généralement au format série). |
 Smartphone Smartphone |
SmartPhone
Bien qu'il ne s'agisse pas là d'un type de communication, la question de la façon de contrôler un drone en utilisant un téléphone intelligent est assez récurrente pour justifier une section distincte. Les téléphones intelligents modernes sont des ordinateurs puissants qui peuvent éventuellement passer aussi des appels téléphoniques. Presque tous les téléphones intelligents intègrent le Bluetooth ainsi que le WiFi, qu'ils soient utilisés pour commande un drone et/ou recevoir des données et/ou de la vidéo. |
 Infrarouge Infrarouge |
Infrarouge (IR)
La communication infrarouge (comme celle d'une télécommande de télévision) est rarement utilisée pour contrôler des drones car il y a tant d'interférences IR présentent même dans des pièces normales (a fortiori à l'extérieur) que ce n'est pas très fiable. Bien que cela puisse se faire, on ne le propose pas comme option première. |
Autres considérations
Les fabricants de contrôleurs de vol essayent généralement de proposer le plus de fonctions possibles, qu'il s'agisse d'un équipement standard ou vendu séparément en option/ modules complémentaires. Voici quelques-unes des nombreuses fonctionnalités supplémentaires auxquelles vous voudrez peut-être jeter un œil lors de votre comparaison des contrôleurs de vol. Amortisseurs : même de petites vibrations dans le châssis, généralement provoquées par des hélices et/ou des moteurs déséquilibrés, peuvent être captées par l'accéléromètre embarqué qui, à son tour, va envoyer les signaux appropriés au processeur principal, qui prendra alors des mesures correctives. Ces corrections mineures ne sont pas désirables ni souhaitables pour un vol stable et il est préférable que le contrôleur de vol vibre aussi peu que possible. Pour cette raison, des amortisseurs/absorbeurs de vibrations sont souvent utilisés entre le contrôleur de vol et le châssis. Boîtier : un boîtier protecteur autour du contrôleur de vol peut aider dans un certain nombre de cas. En plus d'être plus esthétique qu'une carte de circuit imprimé nue, un boîtier fournit souvent un certain niveau de protection contre les éléments, ainsi qu'une protection supplémentaire en cas d'accident. Montage : il existe différentes façon de raccorder un contrôleur de vol à un châssis, et tous les contrôleurs de vol ne disposent pas des mêmes options de montage.
- Quatre trous en carré espacés de 30,5 ou 45 mm les uns des autres
- Un fond plat à utiliser avec un adhésif
- Quatre trous en rectangle (pas de réglage standard)
Communauté : puisque vous créez un drone personnalisé, faire partie d'une communauté en ligne peut aider considérablement, surtout si vous rencontrez des problèmes ou si vous recherchez des conseils. Obtenir des conseils d'une communauté, ou lire les commentaires des utilisateurs sur la qualité et la facilité d'utilisation de contrôleurs de vol spécifiques aide également. Accessoires : mis à part le contrôleur de vol par lui-même, d'autres produits (accessoires ou options) peuvent être nécessaires afin de profiter pleinement du produit. De tels accessoires peuvent inclure, mais sans s'y limiter : un module GPS et/ou une antenne GPS ; des câbles ; des accessoires de montage ; un écran (LCD/OLED) ;
Exemple
Donc, compte tenu de toutes ces différentes caractéristiques comparatives, quelles informations pouvez-vous être en mesure d'obtenir concernant un contrôleur de vol, et sur ce que pourrait inclure un contrôleur de vol ? Nous avons choisi le contrôleur de vol Quadrino Nano en tant qu'exemple récent.
Processeur principal
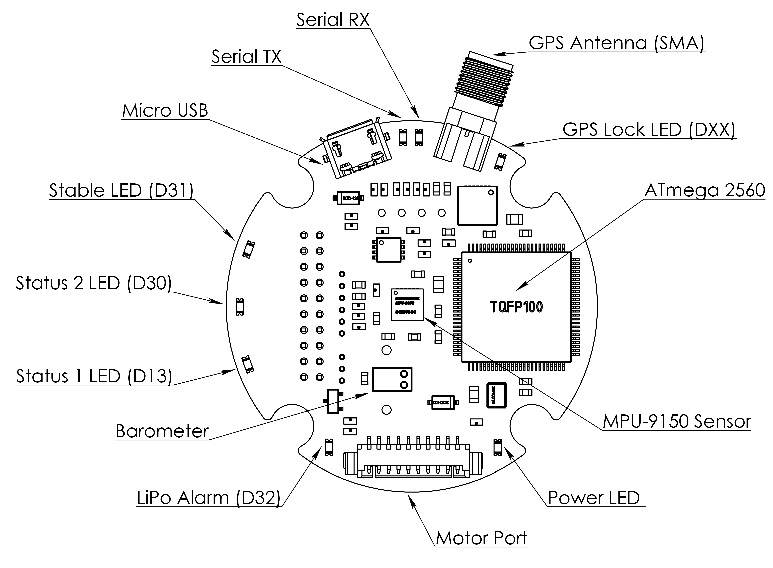
L'ATMel ATMega2560 utilisé sur la carte est une des puces ATMel disponibles compatibles Arduino les plus puissantes. Bien qu'il dispose d'un total de 100 broches, dont 16 canaux analogiques/numériques et cinq ports SPI, en raison de sa petite taille et de l'utilisation prévue en tant que contrôleur de vol, seulement quelques-unes d'entre elles sont réparties sur la carte.
- AVR/ PIC : AVR
- PROCESSEUR : 8 bits
- Fréquence opérationnelle : 16 Mhz
- Mémoire Flash/Programme : 256 Ko
- Mémoire SRAM : 8 Ko
- Mémoire EEPROM : 4 Ko
- Broches E/S supplémentaires : 3 x I2C ; 1 x UART ; 2 x GPIO 10 broches ; Servomoteur avec 5 sorties ; port OLED
- Convertisseur A/N : 10 bits
|
 ATMega 2560 ATMega 2560 |
Capteurs
Le Quadrino Nano intègre la puce IMU MPU9150 qui comprend un gyroscope à 3 axes, un accéléromètre à 3 axes et un magnétomètre à 3 axes. Cela contribue à rendre la carte assez petite sans sacrifier la qualité du capteur. Le baromètre MS5611 fournit des données sur la pression et il est recouvert d'un morceau de mousse. Le GPS Venus 838FLPx est avec antenne GPS externe (comprise) |
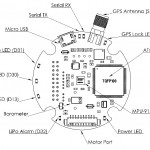 Capteurs Quadrino Nano Capteurs Quadrino Nano |
Logiciel
Le Quadrino Nano a été spécialement conçu pour utiliser le tout dernier logiciel MultiWii (basé sur Arduino). Plutôt que d'avoir à modifier directement le code Arduino, un logiciel séparé, plus graphique, a été créé. |
 Logiciel Quadruino Logiciel Quadruino |
Communication
- Entrée directe depuis un récepteur RC standard.
- Port récepteur satellite dédié Spektrum
- Série (SBus et/ou Bluetooth ou liens radio 3DR)
|
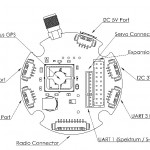 Communication Quadrino Communication Quadrino |
Autres considérations
- Boîtier : un boîtier semi-transparent de protection est inclus en tant qu'équipement standard
- Montage : il existe deux façons principales de monter le Quadrino Nano sur un drone : des vis et des boulons ou de la mousse adhésive
- Conception compacte : le contrôleur par lui-même (antenne GPS non connectée) mesure 53 x 53 mm.
|
 Quadrino Nano Lynxmotion Quadrino Nano Lynxmotion |




 Capteurs Quadrino Nano
Capteurs Quadrino Nano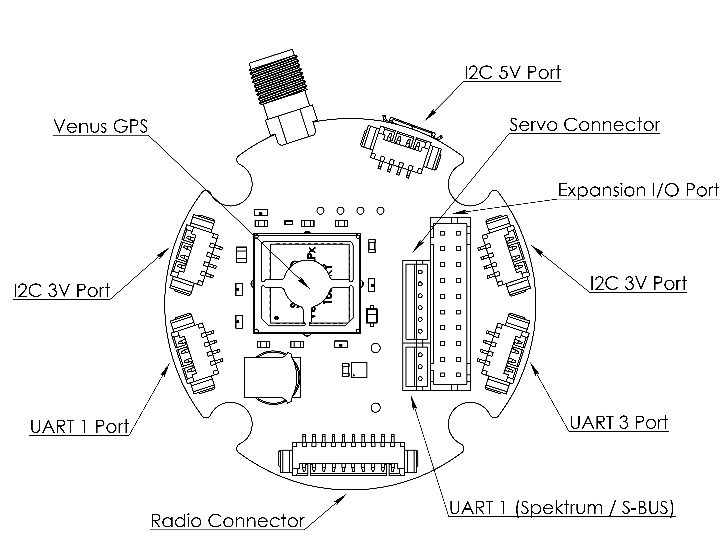 Communication Quadrino
Communication Quadrino Quadrino Nano Lynxmotion
Quadrino Nano Lynxmotion