Donc, vous cherchez à vous lancer dans les drones et les UAV? Cette série de didacticiels est conçue pour vous aider à comprendre le domaine émergeant des UAVs et à vous guider à travers les processus de la construction de votre propre UAV en utilisant des pièces du commerce. La terminologie et les définitions utilisées ici sont destinées à vous donner, vous le lecteur, une compréhension de chaque terme plutôt qu'une définition de type dictionnaire. Bien que de nombreux mots ont des significations multiples, la définition est utilisée dans le contexte des drones / UAV.
Terminologie
Types
| ARF |
"Almost Ready to Fly" veut dire « presque prêt à voler » : un UAV qui est livré assemblé avec presque toutes les pièces nécessaires pour voler. Des composants tels que le contrôleur et le récepteur peuvent ne pas être inclus. |
| BNF |
« Bind and Fly » (lier et voler) : le UAV est livré entièrement assemblé et comprend un récepteur. Il vous suffit de choisir un émetteur compatible et de le « lier » (bind) au récepteur. |
| DIY |
"Do It Yourself" « Faites-le vous-même » , qui est désormais communément utilisé pour signifier « personnaliser ». Ceci implique normalement l'utilisation de pièces d'un grand nombre de fournisseurs différents et la création ou la modification de pièces. |
| Drone |
Il s'agit d'un synonyme de UAV. Le terme « drone » semble être plus fréquent à des fins militaires alors que « UAV » est plus fréquent pour l'utilisation ludique / hobbyiste. |
| Hexacoptère |
Un UAV doté de six moteurs / hélices. |
| Multirotor |
« Multirotor » désigne simplement un avion doté de plusieurs rotors. |
| Octocoptère |
Un UAV doté de huit moteurs / hélices. |
| Quadricoptère |
Un UAV doté de quatre moteurs / hélices et de quatre bras de support. Les configurations sont habituellement en « + » (l'avant de l'UAV fait face à l'un des bras) ou en « X » (l'avant de l'avion se trouve entre deux bras). |
| RTF |
« Prêt à voler » : un UAV qui est livré totalement assemblé avec toutes les pièces nécessaires. Il vous suffit de charger la batterie et de voler ! |
| Dimensions (mm) |
Les « dimensions » sont généralement fournies en millimètres (par exemple 450 mm) et représentent la plus grande distance point à point entre le centre de deux moteurs sur un UAV. Les dimensions peuvent également déterminer la « classe » de UAV (micro, mini etc.) |
| Spyder |
Un UAV de type « Spyder » (généralement un quadri ou hexacoptère) est un appareil où les bras de support ne sont pas symétriques dans les deux axes du robot quand on le regarde du dessus. |
| Tricoptère |
Un UAV doté de trois moteurs/hélices et habituellement de trois bras de support. |
| UAV |
« Unmanned Aerial Vehicle » (de toute nature) |
| V-Tail (empennage en V) |
Un UAV doté de quatre bras, dont les deux à l'arrière forment un angle en « V ». |
| X4/X8 |
X4 et X8 sont des configurations de UAVs avec quatre bras de support ; les configurations X4 disposent d'un moteur à l'extrémité de chaque bras, tandis que les X8 possèdent deux moteurs par bras (un vers le haut, l'autre vers le bas). |
| Y3/Y6 |
Y3 et Y6 sont des configurations de UAVs avec trois bras de support ; les configurations Y3 disposent d'un moteur à l'extrémité de chaque bras, tandis que les Y6 possèdent deux moteurs par bras (un vers le haut, l'autre vers le bas). |
 Quadricoptère Quadricoptère |
 V-Tail (empennage en V) V-Tail (empennage en V) |
 Cadre octocoptère Cadre octocoptère |
Mécanique
| CG |
« Centre de Gravité » : il s'agit du point sur l'avion où le poids est également réparti sur chacun des côtés. |
| Clamp |
Un « tube clamp (collier de tube) » est un dispositif normalement utilisé sur un tube rond pour le connecter à un autre dispositif (tel qu'un support du moteur ou le châssis d'un UAV). |
| Connecteurs |
Pour brancher et débrancher les fils, des connecteurs sont utilisés aux extrémités des fils. Les connecteurs standard pour les batteries sont des Deans et XT60, tandis que les connecteurs pour le contrôleur de vol et les capteurs sont à pas de 0,25 cm (0,1 pouce). |
| Amortisseurs |
Ces sont des pièces en caoutchouc moulé utilisées pour réduire les vibrations transmises à travers un UAV. |
| Cadre |
Le cadre est un peu le « squelette » de l'avion et maintient toutes les pièces ensemble. Les cadres simples disposent de moteurs connectés à des extrusions (bras) légères, en aluminium ou autre, ensuite reliées à un châssis central. |
| G10 |
Il s'agit d'un matériel couramment utilisé à la place de la fibre de carbone pour fabriquer le cadre d'un UAV, car il est très rigide et léger, mais nettement moins cher. |
| Train d'atterrissage |
Le train d'atterrissage d'un multirotor n'a généralement pas de roues, contrairement aux avions ; c'est pour l'empêcher de bouger lorsqu'il est au sol et réduire le poids total. |
| DEL (LED) |
« Diode électroluminescente ». Elles sont utilisées pour rendre le drone visible, surtout la nuit ou dans des conditions de faible éclairage. Avec deux couleurs ou plus, vous pouvez aussi voir l'orientation. |
| Protections d'hélice |
Les « protections d'hélice » sont des formes qui entourent chaque hélice pour l'empêcher d'entrer en contact avec d'autres objets. Elles sont appliquées en tant que dispositif de sécurité et moyen de minimiser les dommages au UAV. |
| Rétractable |
« Rétractable » se réfère normalement au train d'atterrissage doté de deux positions : une pour l'atterrissage et le décollage, et une autre qui prend moins de place ou améliore la visibilité pendant le vol. |
| Coque |
Il s'agit d'un capot esthétique / fonctionnel utilisé pour améliorer la résistance aux intempéries et, parfois, l'aérodynamisme. Certains UAVs de production ne disposent seulement que d'une coque en plastique qui sert également de « cadre ». |
 Amortisseur anti-vibrations Amortisseur anti-vibrations |
 Train d'atterrissage simple Train d'atterrissage simple |
 Coque d'u UAV Coque d'u UAV |
Propulsion
| BEC |
"Battery Elimination Circuit" ou « Circuit éliminateur de batterie » : un régulateur de tension intégré dans l'ESC qui peut fournir une puissance de 5 VCC régulée à toute pièce électronique en ayant besoin. |
| Pales |
Les pales d'hélice sont la surface aérodynamique qui génère de la portance. Une hélice comporte normalement de deux à quatre pales qui peuvent être fixes ou pliables. |
| CW/CCW |
CW indique une rotation dans le Sens des aiguilles d'une montre (clockwise) et CCW une rotation dans le Sens inverse des aiguilles d'une montre (counter-clockwise). Sur un avion multirotor, vous utilisez généralement des paires d'hélices - un CW et l'autre CCW. |
| ESC |
"Electronic Speed Controller" ou « Contrôleur électronique de vitesse » : c'est le dispositif qui est relié à la batterie, au contrôleur de vol et au moteur et qui commande la vitesse à laquelle le moteur tourne. |
| LiPo |
La batterie « Lithium polymère » est celle la plus couramment utilisée dans les drones et les UAVs en raison de son poids léger (par rapport à sa capacité de stockage) et de son taux de décharge de courant élevé. Il existe d'autres types de batteries à base de lithium également disponibles sur le marché (LiFe, LiMn, LiOn etc.). |
| Moteur |
Le moteur est ce qui est utilisé pour faire tourner les hélices ; pour les petits UAVs, un moteur à brosse est le plus souvent utilisé, tandis que pour les plus grands UAVs, un moteur « sans brosse » est beaucoup plus utile. |
| Carte de circuit imprimé (PCB) |
"Printed Circuit Board" ou « Carte de circuit imprimé » est la pièce plate en fibre de verre qui comporte de nombreux composants soudés. De nombreux produits électroniques utilisées dans les UAVs disposent d'une carte de circuit imprimé. |
| Distribution de l'alimentation |
Afin d'alimenter de si nombreux dispositifs utilisés dans un UAV, la batterie doit être répartie, c'est là que la distribution de l'alimentation (carte ou câble) entre en jeu. Elle s'alimente sur les bornes positive et négative uniques de la batterie et fournit de nombreux terminaux/ points de raccordement différents pour d'autres appareils (fonctionnant à la même tension) qui peuvent ainsi être alimentés. |
| Hélice |
Les hélices sont ce qui fournit la poussée et sont plus semblables à celles utilisées sur les avions plutôt que sur les hélicoptères. |
| Adaptateur d'hélice |
Un dispositif utilisé pour connecter l'hélice au moteur. |
| Économiseur d'hélice |
Un type de moyeu qui se monte au-dessus de votre moteur et remplace l'adaptateur d'hélice. En cas d'accident, une partie de l'économiseur d'hélice est perdue lors d'une tentative pour sauver l'hélice. |
| Servomoteur |
Un servomoteur est une type d'actionneur qui, s'il reçoit le bon signal, peut se déplacer à une position angulaire spécifique. |
| Poussée |
La « poussée » est la force qui peut être produite par un moteur et une hélice spécifiques (à une certaine tension). Habituellement mesurée en kilogrammes (kg) ou en livres (lb). |
 Batterie LiPo Batterie LiPo |
 Hélices CW/CCW Hélices CW/CCW |
 Carte de distribution de l'alimentation Carte de distribution de l'alimentation |
Commandes
| Station de commande base/ au sol |
Au lieu (ou en plus) d'un émetteur portatif, une station (habituellement dans une boîtier ou montée sur un trépied) est utilisée pour accueillir / intégrer les composants nécessaires au contrôle d'un UAV. Cela peut inclure un émetteur, une ou des antenne(s), un récepteur vidéo, un écran, une batterie, un ordinateur et tout autre appareil. |
| Binding (liaison) |
Le terme « binding » se réfère à la configuration d'un émetteur portatif de sorte qu'il puisse communiquer avec un récepteur ; si un émetteur est livré avec un récepteur, cela a dû être fait en usine. |
| Canal |
Le nombre de canaux sur un émetteur se rapporte au nombre de signaux séparés qu'il peut envoyer. |
| Contrôleur de vol |
Le « Contrôleur de vol » est ce qui peut être considéré comme le « cerveau » d'un UAV et gère tous les traitements de données, les calculs et les signaux. Le cœur d'un contrôleur de vol est souvent un « microcontrôleur » programmable. Le contrôleur de vol peut disposer de plusieurs capteurs embarqués, dont un accéléromètre, un gyroscope, un baromètre, une boussole, un GPS, etc. Si le contrôleur de vol a la capacité de contrôler l'avion par lui-même (par exemple pour naviguer vers des coordonnées GPS spécifiques), il peut être considéré comme un « pilote automatique ». |
| Faisceau |
Cela fait généralement référence à un « faisceau de câbles » qui regroupe les fils qui relient le récepteur au contrôleur de vol (et parfois à d'autres dispositifs). |
| HF/ UHF / VHF |
Ondes radio « Haute fréquence », « Ultra haute fréquence » et « Très haute fréquence ». Les unités sont les Hz (Hertz). |
| Récepteur |
Il s'agit de ce qui traite les informations reçues sans fil. |
| Scénario/Code |
Il s'agit du programme qui est téléchargé sur le contrôleur de vol de votre UAV (similaire à un « processus de pensée »). |
| Émetteur/Radio |
Un « émetteur » est ce qui génère les signaux de commande sans fil vers le récepteur. |
 Station de commande Station de commande |
 Émetteur Émetteur |
 Contrôleur de vol Contrôleur de vol |
| Accéléromètre |
Un accéléromètre mesure l'accélération linéaire sur un à trois axes. Les unités sont normalement en « g » ou gravité. Un accéléromètre peut fournir l'orientation de votre drone par rapport au sol. |
| Antenne |
Les antennes sont en fait ce qui reçoit ou envoie un signal vers et depuis un UAV (le signal lui-même ayant été généré par un émetteur). Il en existe un grand nombre de types différents et elles peuvent être directionnelles (les plus puissantes sur un seul sens) et omnidirectionnelles. |
| Baromètre/ Pression / Altimètre |
Un baromètre est utilisé pour fournir une rétroaction quant à l'altitude du UAV. Il mesure la pression et, puisque la pression change avec l'altitude, votre appareil peut « connaître » sa hauteur. |
| Boussole |
Un compas magnétique peut fournir une orientation nord / sud / est / ouest. |
| Enregistreur de vol |
L'enregistreur de vol enregistre les valeurs des capteurs de votre UAV. Cette fonction peut parfois être intégrée au contrôleur de vol. |
| GPS |
"Global Positioning System" ou « Système de localisation mondial » : des satellites en orbite autour de la planète envoient des signaux qui sont captés par l'antenne GPS et sont envoyés pour être traités par le récepteur GPS afin de fournir des coordonnées géographiques. |
| Gyroscope |
Un gyroscope mesure l'accélération angulaire sur un ou trois axes. Les unités sont normalement des degrés par seconde carré. |
| IMU |
"Inertial Measurement System" ou une « Centrale inertielle » combine un accéléromètre et un gyroscope entre autres. |
| Magnétomètre |
En robotique à faible coût, un magnétomètre est parfois utilisé pour fournir une orientation du compas. |
| Tangage |
Le tangage est l'angle du nez à la queue par rapport au sol, ou en d'autres termes, la rotation d'un aéronef autour de l'axe d'une aile à l'autre. |
| Tube Pitot |
Un dispositif qui mesure la vitesse de l'air. |
| Roulis |
Le roulis est la rotation de l'aéronef le long de l'axe allant de son nez à sa queue. |
| Lacet |
Le lacet est la rotation d'un aéronef autour d'un axe perpendiculaire (90 degrés) au plan formé entre le nez/queue et le bout des ailes. |
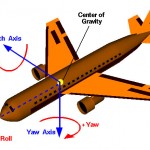 Roulis / tangage / lacet Roulis / tangage / lacet |
 Capteur de vitesse anémométrique Capteur de vitesse anémométrique |
 Module GPS Module GPS |
| FPV |
"First Person View" ou « Vol en immersion » : Le UAV est doté d'une caméra et l'opérateur dispose d'un flux vidéo en direct affiché soit sur un moniteur ou sur des lunettes de réalité virtuelle. |
| Cardan |
Des dispositifs qui supportent une caméra et sont normalement actionnés soit à l'aide de servomoteurs ou de moteurs à courant continu sans brosse. Un cardan est ce qui permet de stabiliser une caméra en vol. |
| GoPro |
La série de caméras de marque GoPro sont largement utilisée pour la prise et/ou la transmission de la vidéo. |
| Écran LCD |
« Écran à cristaux liquides » est une type d'écran / moniteur utilisé pour afficher l'image reçue par le récepteur. |
| OSD |
« L'Affichage à l'écran » fournit du texte sur le moniteur / écran qui est envoyé à partir de l'avion (il peut inclure l'altitude, la position GPS, etc.). |
| Réalité virtuelle (VR) |
Les lunettes de « Réalité virtuelle » procurent à l'opérateur une expérience plus « immersif ». |
 Cardan à 2 axes Cardan à 2 axes |
 Moniteur LCD pour vol en immersion Moniteur LCD pour vol en immersion |
 Lunettes VR Lunettes VR |
Avez-vous vraiment envie de créer un UAV personnalisé ?
Le choix de UAV dépend de l'investissement en termes d'heures et prix que vous souhaitez y consacrer. Construire un UAV personnalisé peut être assez complexe, voir même dangereux. Si vous préférez simplement voler rapidement, nous vous suggérons ce qui suit, par ordre de complexité croissante :
Les jouets multirotor sont de plus en plus populaires. La plupart sont de petite taille, et peuvent être tenu dans la paume de votre main. Certains comme l'A.R. Drone Parrot sont plus grands mais très légères. Les Jouets UAV multirotor ne sont pas nécessairement faciles à piloter, mais sont plus résistants aux accidents. Les jouets ont tendance à être plus petits et à intégrer le cadre au sein d'une coque esthétique.
Un kit « prêt à voler » comprend toutes les pièces nécessaires pour un UAV complet. Les pièces incluent le UAV lui-même (le plus souvent pré-assemblé et pré-câblé), l'émetteur portatif, une batterie et un chargeur. L'engin est calibré et devrait être en mesure de voler avec une relative facilité. Ceux-ci ne sont cependant pas indestructibles, et un accident peut endommager le système à un point où il est tout simplement préférable d'acheter un nouvel appareil plutôt que de tenter de le réparer.
Dans un kit « presque prêt à voler » le cadre, les moteurs et la plupart des pièces « de base » sont inclus et entièrement assemblés (ou seules quelques pièces restent à assembler, en grande partie pour aider à la livraison). Normalement, un kit ARF nécessite l'ajout d'un émetteur / récepteur et peut-être des batteries et d'un chargeur. D'autres kits ARF ne comprennent pas le contrôleur de vol. Vous devrez peut-être faire un peu de calibrage en raison des pièces supplémentaires nécessaires. Nous ne proposons pas de kit BNF pour les débutants car tous les émetteurs et les récepteurs ne sont pas toujours compatibles entre eux.
Un kit comprend normalement la plupart des produits importants nécessaires pour construire un UAV, mais incluent rarement l'émetteur / récepteur, la batterie et le chargeur ou le contrôleur de vol. Différents kits ont des contenus différents, il est donc important de voir exactement ce qui est inclus et les éléments supplémentaires qui seront nécessaires. Les contenus d'un kit doivent être compatibles les uns avec les autres et certaines requièrent la soudure.
Vous avez une installation personnalisée lorsque vous combinez divers produits en provenance de différents fabricants et les amenez à travailler ensemble. Cette approche nécessite une bonne connaissance des composants nécessaires pour réaliser un UAV et qui font l'objet de cette série d'articles. Voyez-vous des termes qui manquent et seraient utiles ? N'hésitez pas à les ajouter dans les commentaires ci-dessous.




 Quadricoptère
Quadricoptère V-Tail (empennage en V)
V-Tail (empennage en V) Cadre octocoptère
Cadre octocoptère Amortisseur anti-vibrations
Amortisseur anti-vibrations Train d'atterrissage simple
Train d'atterrissage simple Coque d'u UAV
Coque d'u UAV Batterie LiPo
Batterie LiPo Hélices CW/CCW
Hélices CW/CCW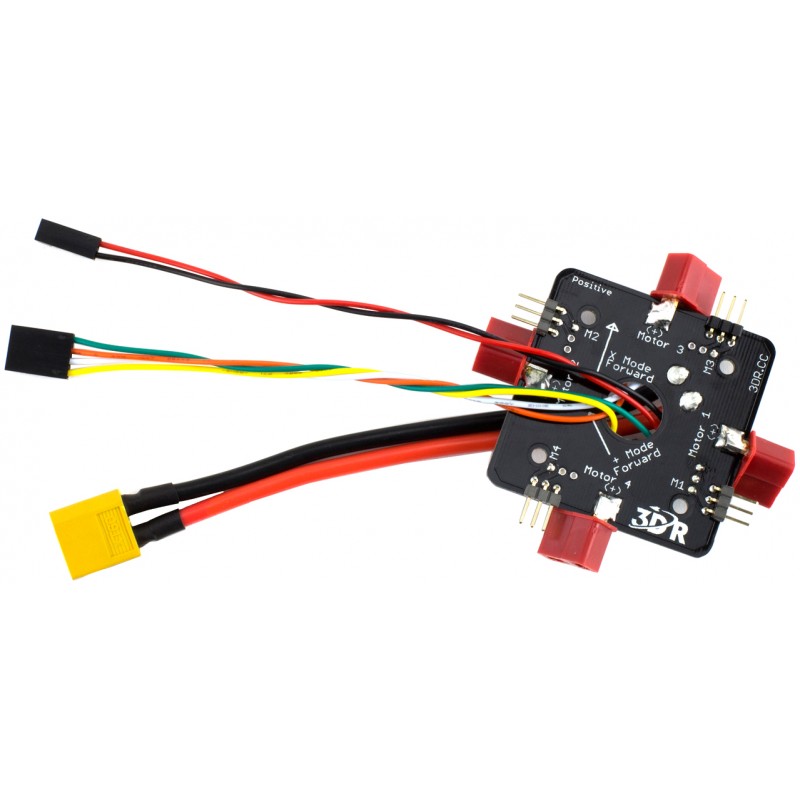 Carte de distribution de l'alimentation
Carte de distribution de l'alimentation Station de commande
Station de commande Émetteur
Émetteur Contrôleur de vol
Contrôleur de vol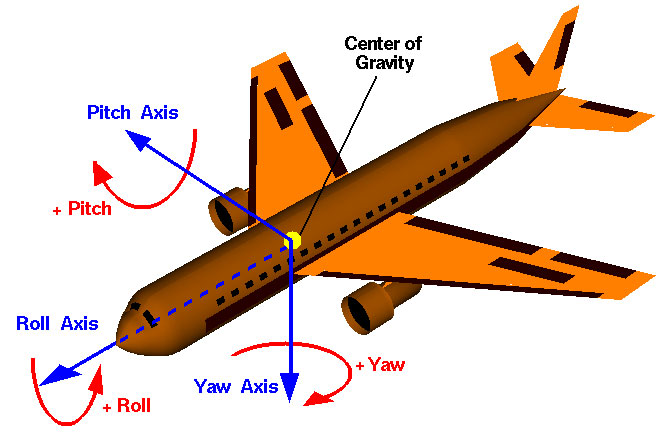 Roulis / tangage / lacet
Roulis / tangage / lacet Capteur de vitesse anémométrique
Capteur de vitesse anémométrique Module GPS
Module GPS Cardan à 2 axes
Cardan à 2 axes Moniteur LCD pour vol en immersion
Moniteur LCD pour vol en immersion Lunettes VR
Lunettes VR