

Comment fabriquer un drone/UAV - Leçon 3 : Propulsion


- Comment fabriquer un drone - Leçon 1 : Terminologie
- Comment fabriquer un drone - Leçon 2 : Le châssis
- Comment fabriquer un drone - Leçon 3 : Choisir les bons moteur/ hélice/ ESC/ batterie
- Comment fabriquer un drone - Leçon 4 : Choisissez un contrôleur de vol
- Comment fabriquer un drone - Leçon 5 : Assemblage
- Comment fabriquer un drone - Leçon 6 : Faites tout travailler ensemble
- Comment fabriquer un drone - Leçon 7 : Vol en immersion (FPV) et longue distance
- Comment fabriquer un drone - Leçon 8 : Avions
À présent que vous avez choisi ou construit un châssis, l'étape suivante consiste à sélectionner le bon système de propulsion. Un système complet de propulsion comprend des moteurs, des hélices, des contrôleurs de vitesse électroniques (ESC) et une batterie. Presque tous les petits drones/UAV multi-rotors sont électriques, et presque aucun n'est à essence. Pour cette raison, nous allons nous concentrer sur la mise en œuvre d'une propulsion électrique utilisant des moteurs à courant continu sans balais.
1. Moteur
Les moteurs que vous utilisez auront un impact énorme sur la charge utile (ou charge maximale) que peut supporter votre UAV, ainsi que sur le temps de vol. Nous suggérons fortement d'utiliser le même moteur (propulsion) partout. Veuillez noter que, même si une paire de moteurs est de la même marque et du même modèle, et de la même chaîne de production, sa vitesse peut varier légèrement, ce qui est quelque chose dont va se charger le contrôleur de vol.
 Moteur à rotor interne Moteur à rotor interne |
Moteur CC sans balais |
 Moteur CC type Pancake Moteur CC type Pancake |
Avec ou sans balais ?
Les moteurs à balais font tourner la bobine à l'intérieur d'un boîtier doté d'aimants fixes montés sur le pourtour extérieur du boîtier. Les moteurs sans balais font l'inverse ; les bobines sont fixées soit à l'extérieure soit à l'intérieur du boîtier tandis que les aimants tournent. Dans la plupart des situations, vous ne devrez envisager que des moteurs CC sans balais. Les moteurs CC sans balais sont largement utilisés dans le secteur des systèmes RC de loisir pour les produits allant des hélicoptères et des avions aux systèmes de contrôle des voitures et bateaux RC. Les moteurs sans balais de type « Pancake » (à disque) ont un plus grand diamètre et sont essentiellement plus plats, ils permettent souvent un couple plus élevé et un KV plus bas (plus de détails ci-dessous). Les UAV les plus petits (généralement de la taille de la paume de votre main) ont tendance à utiliser de petits moteurs à balais en raison d'un prix plus bas et d'un contrôleur à deux fils plus simple. Bien que les moteurs sans balais soient disponibles dans un grand choix de tailles et de spécifications différentes, sélectionner un moteur sans balais plus petit signifie rarement qu'il sera moins cher.
À rotor interne ou externe ?
Il n'existe que quelques types de moteurs à courant continu sans balais :
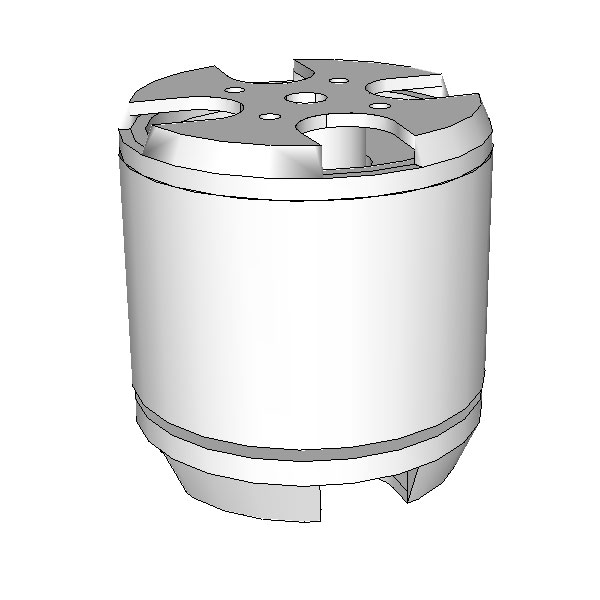
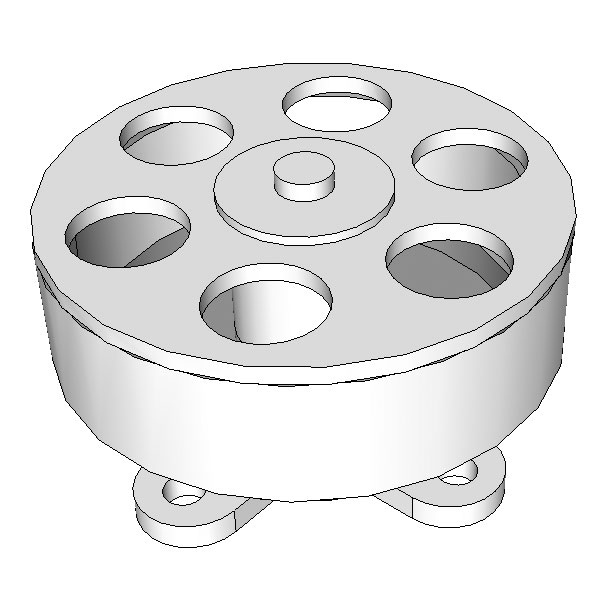
- À rotor interne : ceux-ci ont des bobines fixes montées sur le boîtier externe et les aimants sont montés sur l'arbre d'induit qui tourne à l'intérieur du boîtier (tendance à être utilisés pour les voitures RC en raison d'un Kv élevé)
- À cage tournante : ceux-ci ont les aimants qui sont montés sur le boîtier extérieur, celui-ci est mis en rotation autour des bobines fixes au centre du carter de moteur (la partie inférieure de montage du moteur est fixée).
- Cage tournante hybride : techniquement ils sont à cage tournante, mais ils disposent d'une coque extérieure statique sur leur pourtour pour leur donner l'apparence d'être à rotor interne
Les moteurs CC sans balais à rotor interne ont tendance à être utilisés pour les voitures, avions et hélicoptères RC en raison de leur KV élevé. Ils peuvent également être démultipliés pour augmenter le couple. Ceux à cage tournante ont tendance à avoir plus de couple.
« KV »
Le coefficient/valeur KV d'un moteur se rapporte à la vitesse à laquelle il va tourner pour une tension donnée. Pour la plupart des avions multi-rotors, on recherche un faible KV (entre 500 et 1000 par exemple) car cela contribue à la stabilité. Pour le vol acrobatique cependant, vous pouvez envisager un KV entre 1000 et 1500 ainsi que l'utilisation d'hélices de plus petit diamètre. Si le coefficient KV pour un moteur particulier est de 650 tr/mn/V, alors à 11,1 V, le moteur va tourner à 11,1 V x 650 = 7 215 tr/mn. Si vous utilisez le moteur à une tension inférieure (par exemple 7,4 V), le régime sera de 7,4 V x 650 tr/mn/V = 4 810 tr/mn. Il est important de noter que l'utilisation d'une tension plus faible tend à signifier que la consommation de courant est plus élevée (puissance = tension x courant).
Poussée
Certains fabricants de moteur sans balais donnent une indication de la poussée d'un moteur correspondant à plusieurs options d'hélice (souvent présentées dans un tableau). L'unité de poussée est souvent en kg, livre ou N. Par exemple, si vous construisez un quadricoptère et constatez qu'un moteur spécifique peut fournir jusqu'à 0,5 kg de poussée avec une hélice de 11 pouces (27,94 cm), cela signifie que quatre de ces moteurs (avec cette hélice donnée) peuvent soulever 0,5 kg x 4 = 2 kg de poussée maximale. Par conséquent, si votre quadricoptère pèse un peu moins de 2 kg, à poussée maximale il ne pourra que décoller. Vous devez soit choisir une combinaison de moteur + hélice qui peut fournir plus de poussée, soit réduire le poids de l'avion. Si le système de propulsion (tous les moteurs et accessoires) peut fournir 2 kg de poussée (max.), alors votre hélicoptère complet doit être au plus d'environ la moitié de ce poids (1 kg, poids des moteurs compris). Le même calcul peut être effectué pour une configuration donnée. Supposons le poids d'un hexacoptère (châssis, moteurs, électronique, batterie, accessoires, etc. compris) comme étant de 2,5 kg. Chaque moteur doit donc être capable de fournir (2,5 kg/ 6 moteurs) x 2:1 = 0,83 kg de poussée (ou plus). Vous pouvez à présent calculer les spécifications de votre/vos moteur(s), mais nous vous suggérons de lire les différentes rubriques ci-dessous avant de prendre une décision.
Autres considérations
- Connecteurs : les moteurs à courant continu à balais ont deux connecteurs : un pour le positif, l'autre pour le négatif. Inverser les fils inverse la rotation du moteur.
- Connecteurs : Les moteurs CC sans balais ont trois connecteurs. Reportez-vous à la section ESC (contrôleur de vitesse électronique ) ci-dessous pour savoir comment les câbler et inverser le sens de rotation.
- Enroulements : les enroulements impactent sur le KV d'un moteur. Lorsque vous voulez un KV inférieur, tout en maintenant le couple, vous devrez peut-être envisager un plus grand moteur CC sans balais de type disque.
- Montage : La plupart des fabricants ont un modèle de montage général pour moteurs CC sans balais qui a permis aux entreprises qui produisent des châssis de ne pas avoir à concevoir d'adaptateurs. Le modèle est généralement métrique, avec deux trous espacés de 16 mm d'intervalle, et deux autres trous espacés de 19 mm d'intervalle (à 90 degrés par rapport aux premiers).
- Filetage : Le filetage de montage utilisé pour fixer un moteur sans balais à un châssis peut varier. Les tailles de vis courantes en système métrique comprennent M1, M2 et M3 et en système Impérial elles peuvent être 2-56 et 4-40.
2. Hélice
Les hélices pour avions multi-rotors sont adaptées des hélices utilisées pour les avions RC. Pourquoi ne pas utiliser des pales d'hélicoptère ? Bien que cela ait déjà été fait, imaginez la taille d'un hexacoptère utilisant des pales d'hélicoptère. Notez qu'un système de type hélicoptère exige également de faire varier le pas des pales, ce qui ajoute considérablement à la complexité mécanique. Vous pouvez aussi vous demander pourquoi ne pas utiliser un turboréacteur, des turbosoufflantes, un turbopropulseur etc. ? Ils sont incroyablement bons pour fournir beaucoup de poussée, mais exigent aussi beaucoup de puissance. Si l'objectif du drone est de se déplacer très vite plutôt que de planer dans des endroits clos, l'un d'entre eux peut s'avérer être une bonne option.
 Hélice
HélicePales et diamètre
La plupart des avions multi-rotors ont deux ou trois pales de rotor, la version la plus courante étant deux. Ne présumez pas que l'ajout de plusieurs pales signifie automatiquement plus de poussée ; chaque pale doit voyager à travers le sillage de celle qui la précède, de sorte que, plus il y a de pales plus le sillage est fréquent. Une hélice d'un diamètre plus petit a moins d'inertie et peut donc accélérer et ralentir plus rapidement, ce qui permet du vol acrobatique.
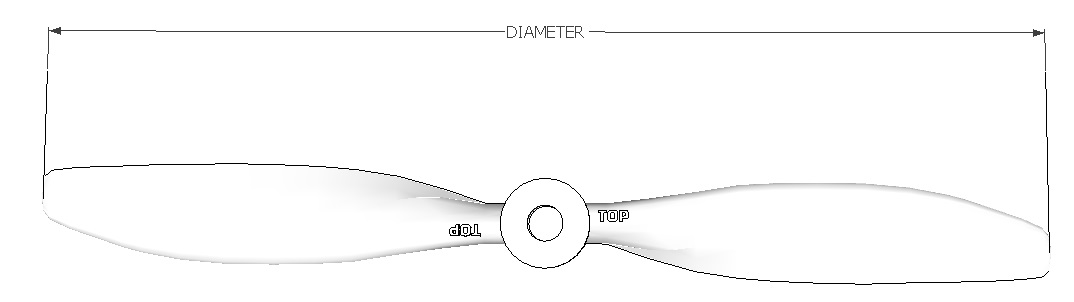 Diamètre d'hélice
Diamètre d'hélicePas/ angle d'attaque/ rendement/ poussée
La poussée produite par une hélice dépend de la densité de l'air, du régime de l'hélice, de son diamètre, de la forme et de la surface des pales, et de son pas. Le rendement d'une hélice se rapporte à l'angle d'attaque qui est défini comme le pas des pales moins l'angle d'hélice (l'angle entre la vitesse relative résultante et le sens de rotation de la pale). Le rendement lui-même est un rapport entre la puissance de sortie et la puissance d'entrée. La plupart des hélices bien conçues ont un rendement de plus de 80 %. L'angle d'attaque est affecté par la vitesse relative, donc une hélice aura un rendement différent à des vitesses de moteur différentes. Le rendement est également fortement influencé par le bord d'attaque de la pale d'hélice, et il est très important que celui-ci soit aussi lisse que possible. Bien qu'une conception à pas variable soit préférable, la complexité supplémentaire requise par rapport à la simplicité inhérente d'un multi-rotor explique pourquoi une hélice à pas variable n'est presque jamais utilisée. Des informations complémentaires concernant la théorie qui soutient la conception d'une pale et la poussée générée peuvent être consultées en ligne sur des sites tels que le projet MDP. Il existe également plusieurs outils en ligne qui aident à calculer la poussée d'une hélice. Certains sites répertorient divers moteurs, tel eCalc, pour le calcul de la poussée
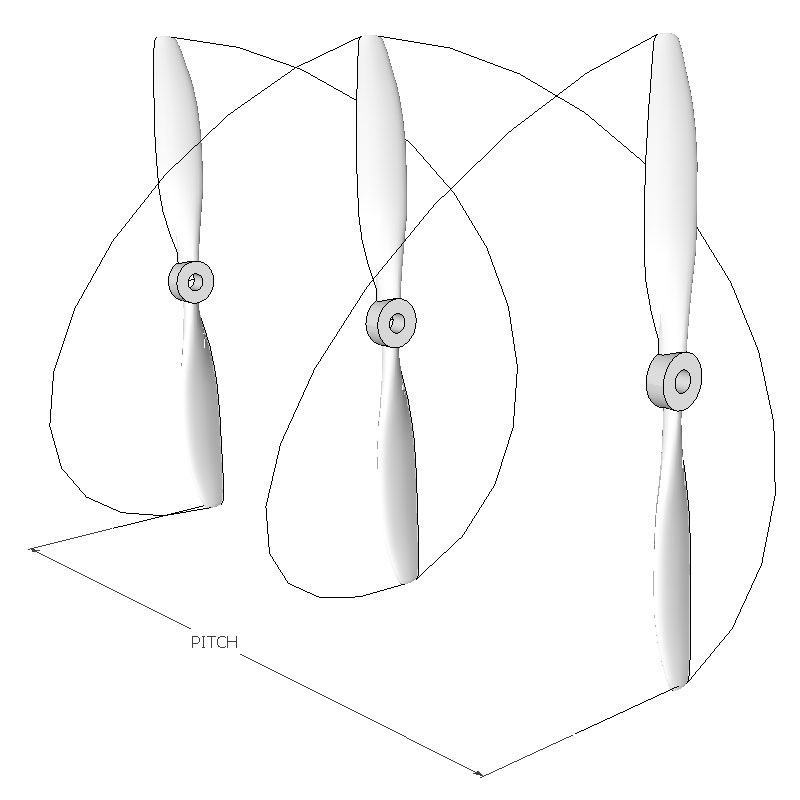 Pas d'une hélice (un tour)
Pas d'une hélice (un tour)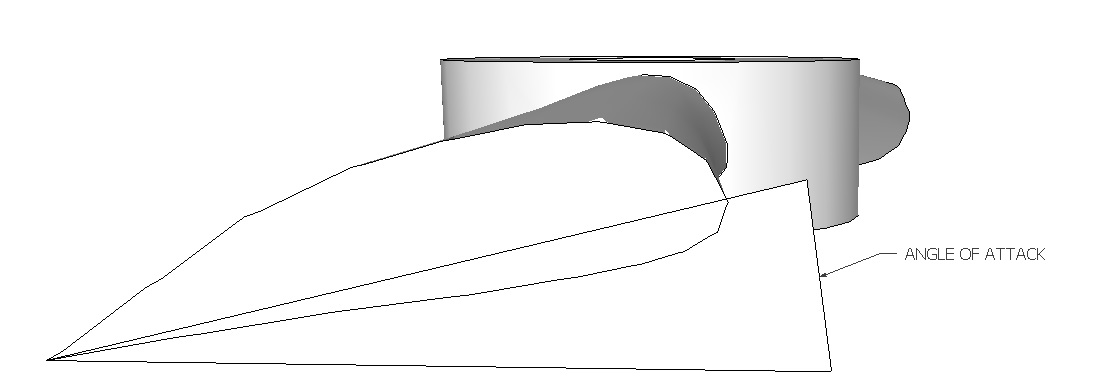 Angle d'attaque d'une hélice
Angle d'attaque d'une héliceRotation
Les hélices sont conçues pour tourner dans le sens horaire (CW) ou anti-horaire (CCW). Il est important de savoir quelle partie de l'hélice est destinée à faire face au haut (la surface supérieure est incurvée vers l'extérieur). Si la conception de votre multi-rotor inverse certains des moteurs (comme c'est le cas pour les Vtail, Y6, X8), n'oubliez pas de changer l'orientation des hélices, de sorte que la poussée soit toujours vers le bas. Le haut de l'hélice doit toujours faire face au ciel. La documentation fournie avec le contrôleur de vol (étudiée dans la prochaine leçon) vous présente normalement de quelle façon une hélice est destinée à tourner pour chaque multi-rotor qu'elle soutient.
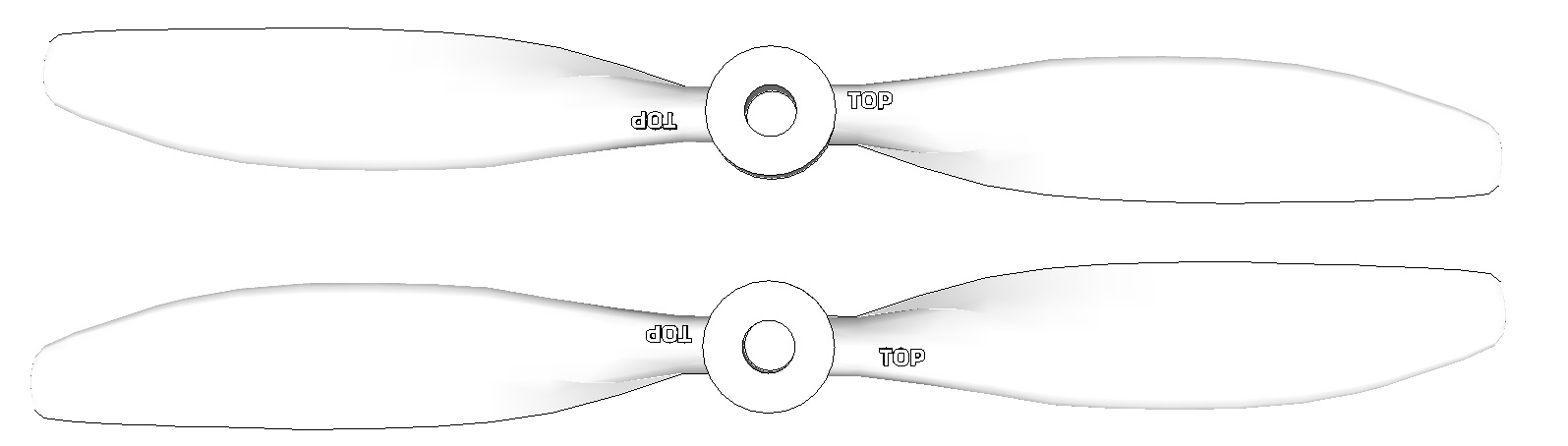 Hélices à contre-rotation
Hélices à contre-rotationMatériau
Le(s) matériau(x) utilisé(s) pour fabriquer les hélices peuvent avoir un impact modéré sur les caractéristiques de vol, mais la sécurité doit être la considération primordiale, surtout si vous êtes novice et inexpérimenté. Plastique Le plastique moulé par injection (ABS/ Nylon etc.) est le choix le plus populaire quand il s'agit des aéronefs multi-rotors. Cela est principalement dû à leur faible coût, leurs caractéristiques de vol convenables et leur respectable robustesse. Normalement en cas de crash, au moins une des hélices est cassée, et tandis que vous calibrez le drone et apprenez à voler, vous allez vous retrouver avec beaucoup d'hélices cassées. Une hélice en plastique qui a été renforcée avec de la fibre de carbone est sans doute le meilleur des choix, en raison de sa grande rigidité et de son faible coût. Polymère renforcé par des fibres Une hélice en polymère renforcé de fibres (fibre de carbone, carbone renforcé de nylon, etc.) est une technologie « à la pointe du progrès » à plus d'un titre. Les éléments en fibre de carbone ne sont pas encore très facile à produire et à ce titre vous allez les payer bien plus cher qu'une hélice en plastique avec les mêmes spécifications. Dans le cas d'un crash, une hélice en fibre de carbone est plus difficile à casser et à plier, c'est pourquoi elle va provoquer plus de dégâts à tout ce qui va entrer en contact avec elle. Ceci étant dit, si vous voulez prendre en compte une hélice renforcée de fibres, elle est normalement bien faite et ne nécessite que rarement d'être équilibrée, elles sont plus rigides (donc moins de pertes de rendement dues à la flexion, etc.) et sont plus légères qu'avec d'autres matériaux. Nous vous conseillons de ne choisir ces hélices de haute performance qu'une fois que vous savez correctement voler. Naturel Les matériaux naturels tels que le bois ne sont pas souvent utilisés pour réaliser des hélices pour multi-rotors car ils nécessitent de l'usinage dans leur production et coûtent donc plus cher que le plastique. Le principal avantage ici est que le bois est assez robuste et ne se plie pas. Les hélices en bois sont encore utilisées pour les avions RC.
 Matériaux pour hélices
Matériaux pour hélicesRepliables
Les hélices repliables ont une partie centrale qui se raccorde à deux pales pivotantes. Lorsque le centre (qui est relié à l'arbre de sortie du moteur) tourne, des forces centrifuges agissent sur les pales, les forçant vers l'extérieur et rendant pour l'essentiel l'hélice « rigide », avec le même effet qu'une hélice fixe. En raison d'une faible demande et du nombre de pièces nécessaires, les hélices à pales repliables sont moins fréquentes que les hélices fixes. Comme prévu, une hélice repliable facilite un peu le transport de l'avion et, combinée avec un châssis pliable, la taille « rétractée » de l'UAV peut être beaucoup plus petite qu'en vol. Les hélices repliables ont aussi le bel avantage de n'avoir qu'une pale à changer en cas de crash.
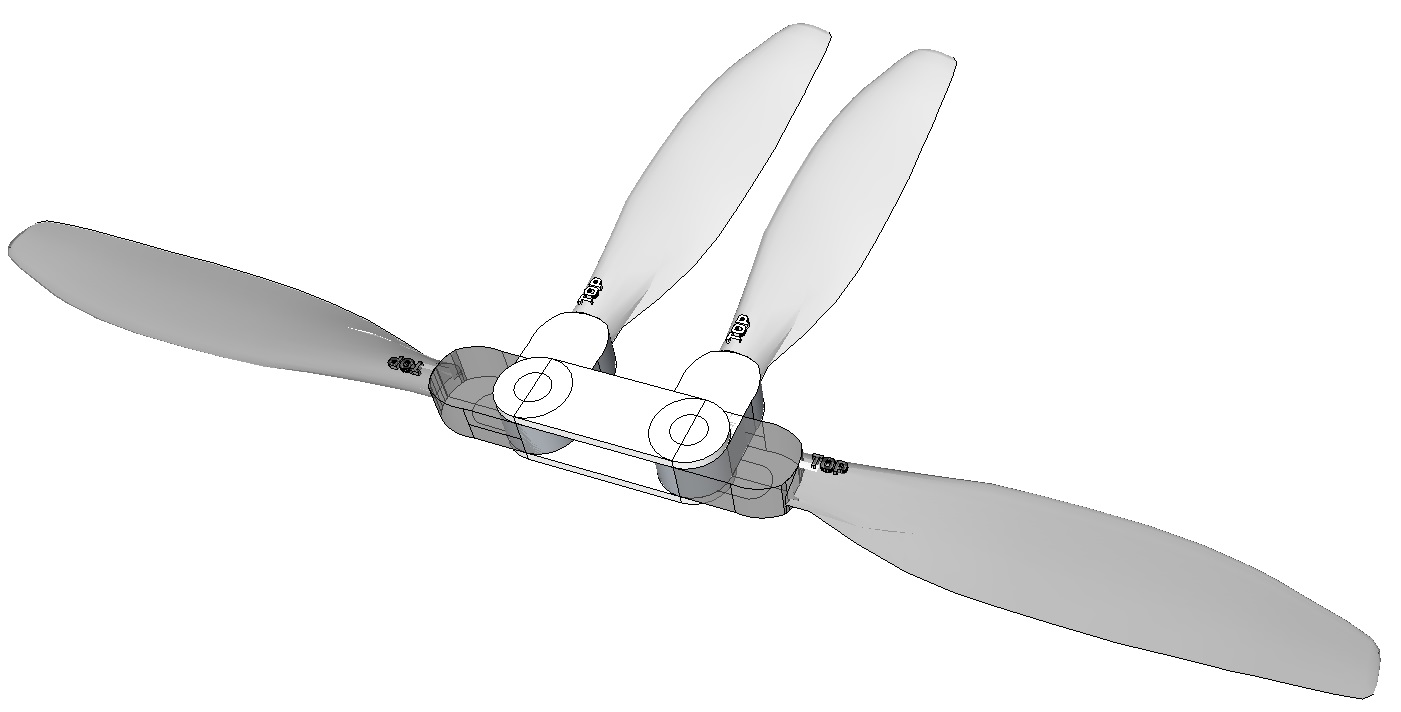 Hélice repliable
Hélice repliableMontage
Puisque les véhicules aériens peuvent exister dans une grand choix de dimensions, il en va de même pour les hélices. En tant que tel, il existe quelques diamètres d'arbres de moteur de dimensions plus « standard » sur ce marché. Les hélices sont souvent livrées avec une petite sélection de ces bagues adaptatrices (qui ressemblent à des rondelles avec divers trous de différents diamètres au milieu) à presser dans une découpe de l'hélice afin de les centrer sur l'arbre du moteur. Si vous trouvez que le centre (« alésage ») de l'hélice que vous utilisez est beaucoup trop grand pour l'arbre de votre moteur, vous aurez besoin d'une bague adaptateur/ entretoise. Ne présumez pas que l'hélice que vous allez acheter comprend l'adaptateur ; vérifiez l'alésage et comparez-le au diamètre de l'arbre de votre moteur. Certains fabricants personnalisent davantage la façon dont l'hélice se monte sur le moteur. Certains ont des découpes en forme de D (simples ou doubles) sur le moteur et l'hélice a le matériau manquant ; ce qui garantit que l'hélice ne se desserre pas en vol. D'autres fabricants sont connus pour inclure d'autres types de moteur spécifiques « masculins/féminins » pour des connexions avec des hélices du même modèle. Les hélices les plus récentes disposent d'un filetage plutôt que d'un trou, et celui-ci est opposé au sens de la rotation, l'arbre du moteur ayant le même filetage, essentiellement pour serrer lors de la rotation.
Économiseurs d'hélice
L'économiseur d'hélice remplace l'adaptateur normal d'hélice sur un moteur et dispose d'une petite pièce (comme un joint torique) qui maintient l'hélice en place. En cas de crash, l'hélice ne peut normalement plus tourner (par exemple si elle est en contact avec un objet) et puisque le moteur tourne encore et que sa vitesse est élevée, cela provoque un déchirement du joint torique, idéalement pour préserver à la fois le moteur et l'hélice contre les dommages. Aussi génial que cela puisse sembler, il existe quelques inconvénients :
- L'hélice se trouve plus haut sur l'arbre
- Si le modèle de l'économiseur d'hélice est impropre ou n'est pas correctement centré, cela peut entraîner des vibrations
- Vérifiez périodiquement les joints toriques car ils peuvent devenir cassants et se déchirer en vol
Protections d'hélice
Les protections d'hélice (« prop gards ») se connectent au châssis principal et offrent un anneau/coussinet fixe autour de l'hélice. Si l'UAV entre en contact avec un objet, dans l'idéal les protections d'hélice qui vont les premières entrer en contact avec l'objet résisteront à l'impact, afin que les hélices ne soient pas touchées. Les petits jouets UAV multi-rotors ont souvent des protections d'hélice amovibles en plastique incluses. Comme toujours, il existe quelques inconvénients à utiliser des protections d'hélice :
- Elles peuvent être une source élevée de vibrations
- Elles ne sont uniquement efficaces que pour des impacts de faible force
- Elles peuvent réduire la poussée, s'il y a trop de supports directement sous les remous de l'hélice
 Protection d'hélice
Protection d'héliceÉquilibrage
La plupart des hélices bon marché ne sont pas très bien équilibrées, ce que l'on peut constater tout simplement en équilibrant le centre sur un crayon (un côté sera probablement plus lourd que l'autre). C'est pourquoi il est toujours bon d'équilibrer vos hélices avant de les fixer sur les moteurs. Il est très important que l'hélice soit équilibrée car sinon les vibrations causées par une hélice déséquilibrée se propagent souvent au contrôleur de vol, provoquant un vol irrégulier. Une hélice peut être équilibrée de nombreuses façons, mais si vous construisez votre propre UAV, un équilibreur d'hélice peu coûteux est alors idéal. Un équilibreur d'hélice vous permet de voir facilement où se trouvent les déséquilibres de masse dans l'hélice. Afin d'ajuster le poids, vous pouvez soit poncer la partie la plus lourde (poncez uniformément la partie centrale de l'hélice seulement par opposition aux bords avant ou arrière, et NE découpez PAS une partie de l'hélice), soit ajouter du ruban à masquer transparent (très mince) sur le côté le plus léger (et continuer à ajouter des longueurs de ruban uniformément jusqu'à ce qu'elle soit équilibrée). Notez que plus vous effectuez la modification loin du centre (ponçage ou ajout de bande), plus il y aura d'effet, en raison du principe de couple.
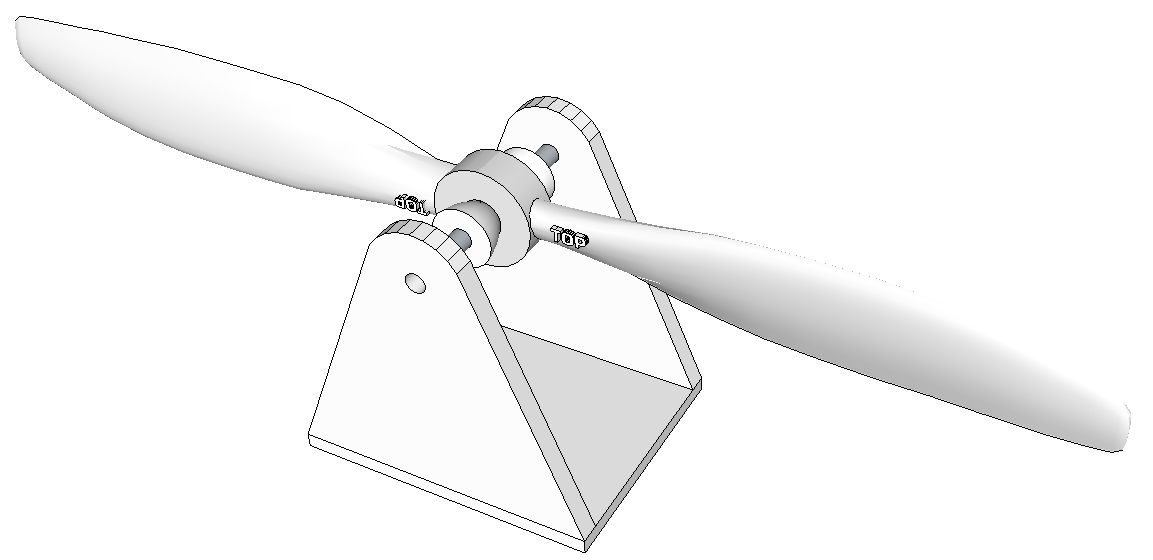 Équilibreur d'hélice
Équilibreur d'hélice3. Contrôleur de vitesse électronique (ESC)
Un ESC (acronyme anglais pour « Contrôleur de vitesse électronique ») est ce qui permet au contrôleur de vol (étudié dans la prochaine leçon) de contrôler la vitesse et la direction d'un moteur. L'ESC doit être capable de gérer le courant maximum que le moteur peut consommer, et être en mesure de le fournir à la bonne tension. La plupart des ESC utilisés dans le secteur du loisir permettent seulement au moteur de tourner dans un sens, mais avec le bon microprogramme, ils peuvent fonctionner dans les deux sens.
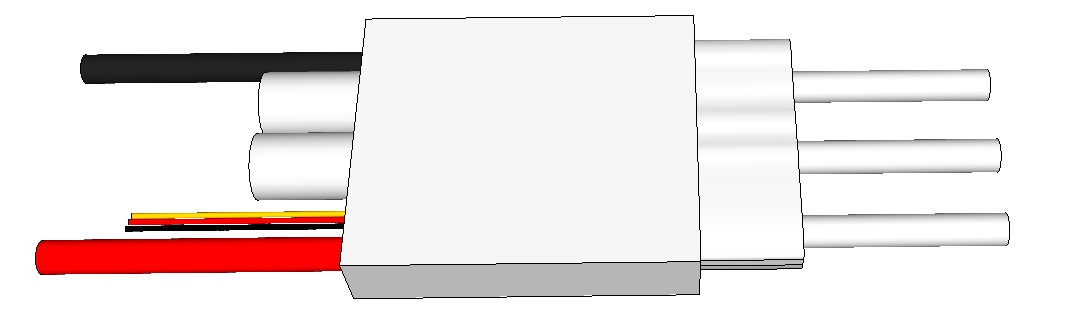 ESC sans balais
ESC sans balaisConnecteurs
Un ESC peut être déroutant de prime abord car plusieurs fils sortent sur deux côtés.
- Alimentation en entrée : Les deux fils épais (normalement noir et rouge) servent à obtenir l'alimentation depuis le faisceau/carte de répartition de l'alimentation, lui-même directement alimenté par la batterie principale.
- 3 connecteurs à cosse : ces broches servent à se relier aux trois broches du moteur sans balais. Il existe quelques tailles standard sur ce marché, mais si vous trouvez que les deux sont incompatibles, vous aurez besoin d'en remplacer un des deux
- Connecteur de servomoteur RC à 3 broches : ce connecteur accepte des signaux RC mais, plutôt que d'exiger du 5 V sur les broches rouge et noire, la plupart du temps un BEC interne fournit du 5 V pour alimenter les composants électroniques.
Dans certains cas, le fabricant ne veut pas présumer du type de connecteur que vous utilisez, et laisse nus les fils d'entrée pour le raccordement et l'alimentation du moteur (il peut fournir des connecteurs à cosses dans l'emballage, que vous pouvez utiliser ou non selon que vous en avez envie ou besoin, et que vous devrez souder sur les fils). Les connecteurs à cosses que vous recevez avec les moteurs peuvent aussi ne pas correspondre à ceux de l'ESC, dans ce cas, il est tout simplement préférable de remplacer l'un ou l'autre. Votre prochaine question est évidemment, puisque j'ai trois connecteurs à cosses, lequel se branche et où dans le moteur ? En ce qui concerne le connecteur de l'alimentation, à vous de choisir ; idéalement, vous utiliserez des connecteurs pour faciliter le démontage de l'ESC en cas de panne, ou si vous voulez l'utiliser sur un autre projet, mais assurez-vous que le positif de l'ESC va sur la borne positive de la batterie, de même pour le négatif. Pour inverser le sens de rotation, permutez deux quelconques des trois connecteurs entre l'ESC et le moteur sans balais.
Circuit éliminateur de batterie (BEC)
La plupart des ESC comprennent ce que l'on appelle un « Circuit éliminateur de batterie » ou BEC. Cela vient du fait que, historiquement, un seul moteur sans balais était nécessaire dans un véhicule RC donné et, plutôt que de diviser la batterie, il suffisait simplement d'être connecté à l'ESC, et celui-ci devait avoir un régulateur de tension intégré pour alimenter l'électronique. Il est important de connaître le courant que le BEC d'un ESC peut fournir, cependant il est habituellement dans la plage des 1 A ou au-dessus et est presque toujours de 5 V. Dans un multi-rotor, vous devez connecter quatre ESC ou plus au contrôleur de vol, mais un seul BEC est nécessaire, et ayant une alimentation provenant de sources multiples, toutes étant alimentées sur les mêmes lignes, cela peut potentiellement causer des problèmes. Comme il n'existe normalement aucun moyen de désactiver un BEC sur un ESC, il est préférable d'enlever le fil rouge et de l'envelopper avec du ruban électrique pour tous les ESC à l'exception d'un. Il est toujours important de laisser le noir (terre) en place pour « une terre commune ».
Microprogramme
Les ESC ne sont pas tous également bons pour une utilisation avec des multi-rotors. Il est important de comprendre qu'avant que les multi-rotors n'existent, les moteurs sans balais de loisirs étaient principalement utilisés pour l'entraînement des voiture RC, les hélices d'avion et en tant que moteurs primaires dans des modèles d'hélicoptères. La plupart de ces applications n'ont pas besoin de temps de réponse ou de mise à jour très rapides. Un ESC équipé d'un microprogramme SimonK ou blheli est capable de réagir très vite (fréquence beaucoup plus élevée) à des changements en entrée, ce qui peut faire toute la différence entre un vol stable et un crash.
Distribution de l'alimentation
Comme chaque ESC est alimenté par la batterie principale, le connecteur unique de la batterie principale doit en quelque sorte être réparti entre les quatre ESC. Pour ce faire, une carte de distribution d'alimentation, ou un faisceau de distribution d'alimentation est utilisé. Cette carte (ou câble) divise les bornes positives et négatives de la batterie principale en quatre. Il est important de noter que le type de connecteurs utilisés sur la batterie, l'ESC et la carte de distribution de l'alimentation peuvent ne pas être tous les mêmes, et c'est préférable, lorsque c'est possible, choisissez un connecteur « standard » (comme les Deans) qui sera utilisé partout. De nombreuses cartes bon marché nécessitent de la soudure, car elles ne veulent pas présumer du connecteur spécifique que vous allez utiliser.
4. Batterie
Éléments chimiques
Les batteries utilisées dans les UAV sont aujourd'hui presque exclusivement au lithium polymère (LiPo), avec d'autres plus exotiques comme les lithium-manganèse ou autres variations de lithium. L'acide-plomb n'est tout simplement pas une option et les NiMh/NiCd sont encore trop lourdes pour leur capacité et ne peuvent souvent pas fournir les débits élevés de décharge nécessaires. Les LiPo offrent une capacité élevée avec un faible poids, et les débits de décharge sont élevés. Les inconvénients proviennent de leur coût relativement plus élevé et des questions de sécurité en continu.
Tension
Vous devriez vraiment n'avoir besoin d'envisager qu'un seul bloc batterie pour votre UAV. La tension de cette batterie doit correspondre aux moteurs que vous choisissez. Presque toutes les batteries utilisées ces derniers temps sont à base de lithium et intègrent un certain nombre de cellules de 3,7 V, où 3,7 V = 1S. Par conséquent, une batterie qui est marquée comme 4S fait probablement 4 x 3,7 V = 14,8 V nominal. Fournir le nombre de cellules vous aidera toutefois à déterminer le chargeur à utiliser. Une batterie à cellule unique de haute capacité peut physiquement se voir un peu comme une batterie multi-cellulaire de faible capacité.
Capacité
La capacité d'un bloc batterie se mesure en ampères/heure (Ah). Les petits blocs batterie peuvent être de l'ordre de 0,1 Ah (100 mAh) alors que des batteries pour drones de petite taille sont de 2 à 3 Ah (2 000 à 3 000 mAh). Plus la capacité est élevée, plus le temps de vol est long, mais plus le bloc batterie est lourd. Vous pouvez estimer le temps de vol d'un drone normal comme étant de l'ordre de 10 à 20 minutes, ce qui peut ne pas sembler une longue période, mais vous devez considérer qu'il est toujours en lutte contre la gravité et que, contrairement à un avion, il n'y a pas de surfaces pour aider le vol ascensionnel.
Taux de décharge
Le taux de décharge d'une pile au lithium est mesurée en C, où 1C est la capacité de la batterie (normalement en ampères-heures, sauf si vous êtes à la recherche d'un très petit drone de la taille d'une main). Le taux de décharge de la plupart des batteries LiPo est d'au moins 5C (cinq fois la capacité), mais puisque la plupart des moteurs utilisés dans les multirotors consomment du courant élevé, la batterie doit être en mesure de décharger un courant incroyablement élevé, qui est souvent de l'ordre de 30 A ou plus.
Sécurité
Les batteries LiPo ne sont pas totalement sûres car elles contiennent de l'hydrogène gazeux sous pression et ont tendance à brûler et/ou exploser quand il y a un problème. C'est pourquoi,, si vous avez des doutes sur le bloc batterie que vous détenez, NE le branchez PAS sur l'UAV ni même sur le chargeur - faites une croix sur lui et débarrassez-vous-en proprement. Des signes indiquant que quelque chose ne va pas comprennent des bosses ou une batterie plus grosse qu'elle ne l'était lorsque vous l'avez reçue (c-est-à-dire des fuites de gaz). Lors du chargement d'une batterie LiPo, il est préférable de la conserver dans un sac sécuritaire LiPo. Stocker une batterie se fait également idéalement dans un sac LiPo. En cas de crash, la première chose que vous devez faire est de débrancher et de vérifiez le bloc batterie. Placer le bloc batterie dans une compartiment entièrement clos peut ajouter au poids, mais peut réellement aider à conserver votre batterie de façon sûre en cas de crash. Certains fabricants de batteries vendent des batteries avec et sans boîtier rigide.
Chargement
La plupart des batteries LiPo ont deux connecteurs : l'un est destiné à être le fil principal « de décharge » qui peut gérer un courant élevé, tandis que l'autre, normalement le plus petit et le plus court, est le connecteur de recharge. Ce connecteur de recharge est presque toujours un connecteur JST blanc doté d'une broche de terre suivi du même nombre de cellules utilisées pour créer le bloc. C'est ce que vous raccordez au chargeur LiPo qui prend alors soin du chargement (et de l'équilibrage) de chaque cellule interne. Le chargeur signalera que le rechargement est terminé et, étant donné les problèmes de sécurité avec des batteries LiPo, il est conseillé de débrancher le bloc batterie et le chargeur lorsque la charge est complète.
Montage
Le bloc batterie est l'élément le plus lourd sur l'UAV et, en tant que tel, doit être placé sur le point mort pour s'assurer que les moteurs sont tous soumis à la même charge. Une batterie n'inclut aucun montage spécifique (en particulier en raison des vis qui pourraient percer la LiPo et provoquer un incendie), de sorte que certaines méthodes de montage actuellement utilisées impliquent des bandes Velcro, du caoutchouc, et des compartiment en plastique, entre autres. Avoir le bloc batterie suspendu sous le châssis grâce à l'utilisation de Velcro est très populaire en raison de l'accessibilité.
 Batterie LiPo
Batterie LiPoThanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!