

Comment fabriquer un drone/UAV - Leçon 6 : Faites tout travailler ensemble

- Comment fabriquer un drone - Leçon 1 : Terminologie
- Comment fabriquer un drone - Leçon 2 : Le châssis
- Comment fabriquer un drone - Leçon 3 : Choisir les bons moteur/ hélice/ ESC/ batterie
- Comment fabriquer un drone - Leçon 4 : Choisissez un contrôleur de vol
- Comment fabriquer un drone - Leçon 5 : Assemblage
- Comment fabriquer un drone - Leçon 6 : Faites tout travailler ensemble
- Comment fabriquer un drone - Leçon 7 : Vol en immersion (FPV) et longue distance
- Comment fabriquer un drone - Leçon 8 : Avions
Dans la leçon 5 vous devez avoir fini l'assemblage du drone (mais pas encore installé les hélices). Les fils peuvent ne pas être très ordonnés, mais voyons cela ensemble, à présent que vous êtes tout excité en pensant à votre premier vol. Ne vous précipitez pas, car même de petites erreurs peuvent entraîner un accident. Il vous reste encore quelques étapes à franchir avant votre premier vol, donc soyez patient, et suivez les instructions ci-dessous. Comme pour la leçon 6, nous allons continuer celle-ci en supposant que vous utilisez une commande RC (la méthode la plus largement utilisée à l'heure actuelle, pour contrôler un UAV).
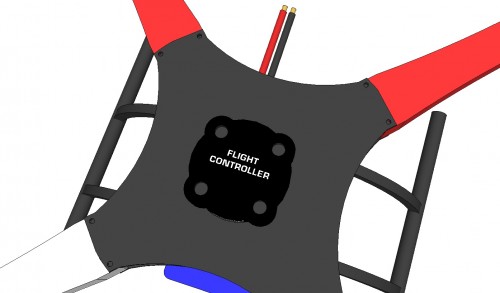
Contrôleur de vol
Les contrôleurs de vol ne sont pas tous les mêmes, c'est pourquoi la procédure d'installation dépend vraiment du modèle que vous avez choisi. Si vous ne l'avez pas déjà fait, prenez le temps de lire le mode d'emploi de votre contrôleur de vol en détail, du début à a fin. Manquer un petit détail peut faire la différence entre un premier vol réussi et un échec total. Un mode d'emploi bien écrit devrait inclure tout ce que vous trouverez sur cette page et bien plus encore, nous vous encourageons à utiliser cette leçon en tant que liste de contrôle et non à titre de remplacement ou de substitut à la lecture approfondie du guide du contrôleur de vol. La plupart des contrôleurs de vol vous proposent une procédure étape par étape concernant les réglages à sélectionner pour la configuration spécifique à votre UAV, y compris le plein contrôle des valeurs PID. Les valeurs de chacun (P, I et D) peuvent être ajustées à votre cadre spécifique et style de vol ; de quelque chose de plus stable pour une utilisation en tant que plate-forme de caméra aérienne à quelque chose de plus sportif (faire des flips, etc.). Il existe des valeurs par défaut/ de départ suggérées pour chaque champ et, sauf si vous vous sentez capable de les modifier, vous devriez envisager de les laisser telles quelles pour votre premier vol. Le manuel du contrôleur de vol devrait également couvrir la façon d'ajuster le réglage de l'accélération minimale, qui correspond à la vitesse à laquelle les moteurs tournent lors de leur activation. Vous pouvez tout d'abord régler cette valeur assez bas ; suffisamment pour voir que les moteurs tournent, mais pas assez pour que le drone ne se déplace sous la poussée qu'ils génèrent. La poussée maximale, si vous pouvez en définir la valeur, doit correspondre à la valeur maximale que peut fournir votre émetteur pour la manette des gaz.
 Contrôleur de vol
Contrôleur de volUn des aspects que pourrait aborder le manuel du contrôleur de vol, sans pour autant vous influencer, est le mode de vol. En se référant à la leçon 4, un « mode de vol » définit quels capteurs sont utilisés pour stabiliser le drone, ainsi que leurs fonctions/objectifs. Les capteurs les plus courants que l'on trouve sur un contrôleur de vol incluent un gyroscope, un accéléromètre, un baromètre, une boussole et peut-être un GPS. S'il s'agit là de votre premier drone, nous vous suggérons fortement le mode de vol le plus stable disponible pour votre contrôleur de vol, et qui utilise la plupart des capteurs disponibles afin de stabiliser le drone. Le problème peut être liè à des paramètres PID trop différents de votre cadre/configuration, c'est pour cela qu'il est préférable de choisir les valeurs des paramètres PID « par défaut ». Si vous avez déjà volé auparavant, le mode ACRO (qui utilise uniquement le gyroscope) peut être le mieux adapté. Beaucoup de contrôleurs de vol vous permettent également de modifier le mode de vol « en cours de vol » via un canal libre. Par exemple, si votre télécommande dispose de six canaux, vous pouvez envisager d'attribuer le canal 5 ou 6 (qui sont souvent associés à des interrupteurs) à la capacité de changer le mode de vol en cours de vol. Assurez-vous de savoir quelle position est associée à quel mode de vol avant de voler. Nous vous suggérons fortement de ne pas utiliser les points de passage GPS ou toute autre fonctionnalité ou capteurs plus complexes (tel qu'un capteur de distance ultrasonique pour déterminer la distance au sol) avant de vous être assuré que l'UAV est bien réglé. Certains guides ne suggèrent que l'utilisation du mode ACRO (acrobatique), mais si vous ne possédez pas assez d'expérience de vol, c'est l'un des plus difficiles à contrôler, car il n'y a pas de stabilisation.
Configuration de l'émetteur RF
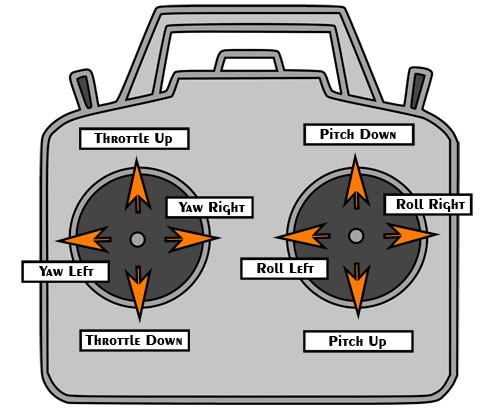
Certains émetteurs disposent de différents modes tels que avion, hélicoptère, voiture, etc. Dans la leçon 6 nous avons abordé les termes « accélération, lacet, tangage,et roulis », qui sont normalement les valeurs associées aux avions ou hélicoptères. Si le manuel du contrôleur de vol ne précise pas un mode particulier pour l'émetteur, nous vous conseillons d'utiliser le mode avions. Les modes de l'émetteur ajoutent souvent une couche de « mixage » des canaux/signaux pour rendre le mouvement plus approprié à une configuration spécifique, cependant la plupart des contrôleurs se gardent bien de tout mélange et, en tant que tel, préfèrent les valeurs « brutes ». Si votre émetteur ne possède pas de modes, il suffit alors de vérifier ce que fait chaque canal/joystick. Il existe deux types de télécommandes : « Mode 1» et « Mode 2 ». Pour les télécommandes en « Mode 2 » (qui sont les plus courantes), l'accélération et le lacet sont souvent associés au joystick de gauche, et le tangage et le roulis au joystick de droite. Vous pouvez également effectuer une double vérification pour voir si les valeurs ne sont pas inversées, par exemple que le déplacement du joystick de gauche provoque un roulis du drone.
 Émetteur RC standard
Émetteur RC standardUn émetteur RC classique ne peut que fournir une gamme limitée de signaux sur chaque canal et, en tant que tel dans la leçon 6, nous conseillons que vous sachiez quelle plage de valeurs peut proposer l'émetteur RC, et si les valeurs minimales et maximales peuvent être ajustées (soit en tant que valeurs, soit en tant que pourcentage de la plage par défaut). Par exemple, les contrôleurs de vol basés sur le MultiWii ont besoin d'émetteurs pouvant fournir la plage complète de 500 à 2500 impulsions, tandis que le réglage par défaut ne peut être que de 1000 à 2000 ms, comme c'est le cas pour une configuration courante pour un avion RC. Lisez le manuel de votre émetteur pour voir comment ajuster les valeurs extrêmes/ plage de signal (si possible). Si votre contrôleur dispose d'un écran LCD, vous pouvez souvent faire tout cela via l'interface sous la rubriques « Paramètres ». Un « Test de la portée » se fait plus facilement avec l'aide de quelqu'un d'autre, ou en connectant un avertisseur sonore RC ou toute autre rétroaction visuelle/auditive sur le drone. Certains modèles haut de gamme disposent d'une fonction pour les tests de portée. Le principe de base est de voir jusqu'à quelle distance le signal se déplace avant que le récepteur ne puise plus le détecter. Nous vous conseillons de ne suivre cette procédure qu'après le premier d'essai (au cours duquel le drone devrait rester dans un très petit rayon de proximité).
- Allumez la radio puis le drone.
- Déplacez-vous d'environ 15 m et appuyez sur l'interrupteur associé à l'avertisseur sonore, vous devriez entendre le signal sonore.
- Si vous ne disposez pas d'un avertisseur sonore, lancez le drone et assurez-vous que les moteurs tournent.
- Arrêtez l'avertisseur sonore/ coupez le drone
- Répétez ces étapes en vous déplaçant de plus en plus loin (ligne de vue), jusqu'à ce que le drone ne réagisse plus à vos signaux.
- Il s'agit là de la portée maximale absolue à laquelle vous pouvez utiliser votre drone.
- Vous pouvez penser que vous ne prévoyez pas de le faire fonctionner si loin, mais gardez à l'esprit qu'un drone se déplace sur trois axes et que les choses peuvent mal se passer.
Étalonnage ESC
Un ESC va fonctionner dès sa sortie de la boîte, mais les signaux (MLI) associés aux accélérations minimale et maximale peuvent ne pas correspondre à celles fournies par votre émetteur. Vous devez donc « apprendre » à votre ESC ce que doivent être ces valeurs. Comme toujours, assurez-vous que les hélices ne sont pas montées sur les moteurs. Jetez un œil au manuel d'utilisation associé à votre contrôleur de vol. Une fois qu'un ESC a été reprogrammé, il retient cette configuration, même s'il n'est plus alimenté. Vous n'avez donc à programmer chaque ESC qu'une fois pour votre multi-rotors, au cours du test/configuration initial. Il existe généralement un chapitre, dans le manuel du contrôleur de vol, qui concerne l'étalonnage des ESC et explique comment l'effectuer. Si ce n'est pas le cas, vous pouvez essayer l'une des méthodes proposées ci-dessous. Une fois de plus, si vos hélices ne sont pas déjà ôtées, RETIREZ LES HÉLICES !
 Étalonnage ESC
Étalonnage ESCÉmetteur
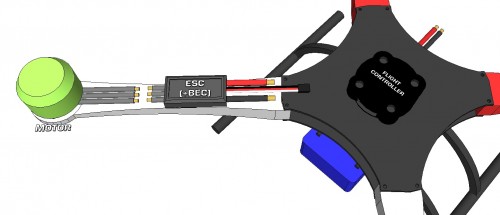
- Connectez un ESC à la broche des gaz de votre émetteur. Si votre ESC n'a pas de BEC connecté, vous pouvez connecter le premier BEC disponible de l'ESC à une broche différente du récepteur (telle qu'une entrée de batterie), uniquement pour alimenter le récepteur.
- Connectez l'ESC au moteur associé (s'il n'est pas déjà raccordé)
- Placez la manette associée aux gaz au maximum (généralement la manette gauche, et en avant/haut toute) puis allumez votre émetteur.
- Connectez la batterie LiPo à la PDB, ou directement à cet ESC (si les connecteurs sont compatibles)
- Le moteur devrait émettre trois bips (11,1 V LiPo), suivis d'une courte pause, puis deux bips courts (cela définit le signal maximum)
- Immédiatement après les bips courts, mettez les gaz en position minimale (cela définit le signal minimum)
- Le moteur doit émettre trois bips (11,1 V LiPo), suivis d'un bip long.
- La plage des gaz de cet ESC est à présent réglée, passez au suivant jusqu'à ce que tous les ESC soient étalonnés.
Autres méthodes Veuillez noter que l'objectif de cette étape est d'assurer l'ESC. Suivez les instructions du manuel d'utilisation du produit, ainsi la plage mini/maxi va correspondre à ce qu'il recevra de l'émetteur.
- USB : Certains modèles d'ESC sont programmables via le port USB, soit nativement, soit en utilisant un adaptateur.
- Carte de programmation : Une carte de programmation externe peut être employée avec la plupart des ESC, c'est un dispositif autonome
- Microcontrôleur : Cette méthode est peu utilisée, mais il est certainement possible de reprogrammer un ESC en utilisant un microcontrôleur, si vous avez le bon code et que vous pouvez réaliser les bonnes connexions.
- Contrôleur de vol : Certains contrôleurs de vol vous permettent d'étalonner ou de programmer l'ESC via leur interface logicielle. Consultez le manuel de votre contrôleur de vol pour savoir si cela est possible.
Moteur et orientation des hélices
Nous sommes à présent prêts à placer les hélices. Il est bon de se référer à la leçon 3, qui traite de l'orientation de l'hélice, de façon à ce que celle-ci produise une poussée. Toutes les hélices ont un HAUT et un BAS, ainsi qu'une orientation horaire (CW) ou anti-horaire (CCW). Le sommet présente généralement un texte en relief indiquant la hauteur et le diamètre. Lorsque l'hélice est placée sur l'arbre du moteur,cette partie supérieure est tournée vers le ciel, indépendamment du fait que le moteur soit monté ou non sur la partie supérieure du bras du multi-rotors ou sur la partie inférieure.
 Hélice
HéliceListe de contrôle d'avant-vol
Bien qu'un drone soit loin d'être aussi complexe ou aussi dangereux qu'un avion de passagers réel, vous êtes toujours le pilote et avez besoin d'avoir une liste de contrôle d'avant-vol pour vous assurer de ne pas mettre en danger les personnes ou les biens. La liste suivante ne recouvre que l'essentiel et s'applique à tous les vols (pas seulement le premier).
- Assurez-vous d'avoir un moyen visuel de savoir quel côté de votre drone correspond à l'avant. Au strict minimum, ajoutez du ruban de couleur aux deux bras.
- Vérifiez que la batterie de votre émetteur est chargée.
- Secouez légèrement le drone : rien ne doit se détacher, tomber au sol ou faire du bruit. Vous ne savez jamais ce qu'un atterrissage brutal peut avoir délogé ou cassé au cours d'un vol précédent.
- Vérifiez que les hélices sont bien connectées : c'est du temps bien dépensé !
- Allumez l'émetteur en premier, puis connectez la batterie à la distribution de l'électricité pour alimenter le drone (gardez vos mains et vos bras loin des hélices).
- Vérifiez que vous pouvez armer et désarmer les moteurs de façon fiable (ils doivent tourner à bas régime quand ils sont armés, et arrêter de tourner une fois désarmés)
- Assurez-vous d'avoir effectué l'étalonnage ou que les capteurs sont bien étalonnés (vous devriez le faire tous les deux vols)
- Réalisez un test de portée de l'émetteur.
- Vérifiez que la zone est totalement livre et, si quelqu'un se trouve dans la zone globale, il doit être informé que vous faites voler un drone et qu'il ne faut pas approcher, en particulier les enfants curieux.
 Premier vol
Premier volTest
Jusqu'à ce que vous ayez acquis suffisamment de confiance en vos capacités de pilote et de concepteur de drone, la procédure suivante est proposée pour tous les prototypes de drones avant leur premier vol.
- Armez les moteurs et vérifiez qu'ils tournent dans le bon sens, celui qui correspond à ce qui est décrit dans le manuel du contrôleur de vol.
- Accélérez très lentement et confirmez que les hélices repoussent l'air vers le bas, vers le sol. Utiliser du papier de soie est une option sûre pour un contrôle visuel.
- Déplacez la manette associée au tangage très doucement de l'avant vers l'arrière pour voir si le drone tangue correctement en avant/arrière.
- Déplacez la manette associée au roulis très doucement d'un côté à un autre pour voir si le drone répond correctement.
Si le drone ne se comporte pas correctement, il peut y avoir de nombreuses raisons possibles, les plus courantes sont :
- Un ou plusieurs moteurs tournent dans le mauvais sens
- L'ESC peut être connecté à la mauvaise sortie du contrôleur de vol.
- Une ou plusieurs hélices ont été installées dans le mauvais sens, se détachent, ou sont à l'envers.
- Le contrôleur de vol n'a pas été installé correctement et ce qu'il prend pour l'avant ne correspond pas à votre UAV physique
- Une ou plusieurs des broches entre le récepteur et le contrôleur de vol sont branchées de manière incorrecte, ou même au mauvais endroit.
- Tout a peut-être été installé correctement mais il réagit trop rapidement ou de façon spectaculaire aux signaux de l'utilisateur
 Vol
VolUn plan pour les situations d'urgences
La plupart des situations d'urgence résultent d'une collision du drone, et la plupart des collisions se produisent lorsque vous débutez sur le terrain et/ou avec un nouveau drone. La liste ci-dessous est destinée à vous faire réfléchir à quelques idées quant à la façon de réagir et au pourquoi quand on est un pilote novice. Ceci est présenté au cas par cas et, dans certaines situations, il peut être approprié d'agir de façon totalement à l'opposé de ce qui est suggéré ici, donc jugez par vous-même, apprenez à connaître votre environnement et agissez en toute sécurité ! Dans presque tous les cas, il est préférable de perdre le drone que de risquer de heurter des personnes ou des biens.
- Le drone est très loin et vous ne savez pas dans quelle direction il va
- Baissez l'accélération et voyez si le drone répond (tests pour voir si vous avez encore une communication).
- Si le drone répond à la manette des gaz, essayez de vous poser immédiatement (si vous le pouvez).
- Si l'endroit ne convient pas à un atterrissage, essayez doucement de faire tanguer le drone vers l'avant (rien de drastique) et si le drone répond, d'après ce que vous en voyez, en se déplaçant vers la gauche ou la droite dans le ciel, cela vous aidera à déterminer son orientation. S'il ne semble pas aller vers la gauche ou la droite, il peut se déplacer vers vous ou s'éloigner, arrêtez alors ce que vous venez de faire et essayez d'effectuer des lacets sur la gauche.
- Le drone vire de façon soudaine et radicale hors de son parcours (avec ou sans raison)
- Si vous n'êtes pas suffisamment qualifié en tant que pilote (pour essayer de le récupérer), coupez complètement les gaz et laissez-le s'écraser : Apporter des corrections radicales peut vous faire perdre le drone de vue ou pire, faire augmenter son altitude pour un accident d'une plus grande hauteur.
- Le drone se dirige rapidement vers des personnes
- Accélérez au max pour le faire monter et passer au dessus d'eux ; votre drone a encore probablement une orientation générale correcte, il est donc préférable de perdre le drone que de heurter des gens.
- Une fois qu'il est assez haut dans le ciel, essayez de faire de votre mieux pour reprendre le contrôle et pour le positionner au dessus d'un point d'atterrissage libre.
- Le drone se dirige rapidement vers vous
- Décélérez à zéro ; il est préférable de heurter le sol plutôt que votre tête.
- Le drone ne répond pas aux signaux du contrôleur
- Vous ne pouvez plus rien faire. Si votre drone est toujours en l'air, les batteries de votre émetteur sont peut être mortes.
- Le drone perd une hélice
- Perdre une hélice affecte à la fois la poussée et le lacet ; essayez de corriger d'abord le lacet (vous aurez probablement besoin de maintenir la manette associée au lacet sur une position extrême), puis accélérez simultanément doucement pour tenter d'empêcher un accident, et enfin diminuez les gaz.
 Voler trop près des gens
Voler trop près des gensPremier vol
Indépendamment de toute expérience antérieure de vol que vous pourriez avoir, votre premier vol, en particulier avec un multi-rotors personnalisé, devrait essayer de se faire aussi « discrètement » que possible. L'objectif de ce premier vol est de constater que tout a été configuré correctement et s'il existe des problèmes majeurs.
- Le lieu : Un espace ouvert, loin des gens et des objets. Un terrain de football, de baseball, une piste d'athlétisme, etc. vides sont parfaits. Il ne faut absolument pas de vent.
- Lancez la liste de contrôle d'avant-vol.
- Tenez-vous à environ 2 mètres du drone, avec l'avant du drone à l'opposé de vous.
- Armez les moteurs.
- Accélérez doucement. Vous allez atteindre le point où le drone semble prêt à décoller. Il peut y avoir des effets de sol qui font que le drone rebondit un peu, mais ne vous en inquiétez pas.
- Accélérez jusqu'à ce que le drone s'élève juste au dessus du sol et habituez-vous aux commandes (essayez de le maintenir dans un certain rayon et voyez comment il réagit à vos commandes).
- Utilisez de petits mouvements, incrémentiels et en douceur (rien de trop soudain). Décélérez pour éviter un crash
- Si votre drone ne se comporte pas comme prévu (par exemple si un déplacement de l'axe de tangage l'amène à tanguer mais aussi à rouler sur la gauche ou la droite), quelque chose ne va pas, et vous devez rechercher quoi.
- Si le drone se comporte comme prévu, votre objectif est de planer dans les 1,20 à 1,80 m du sol dans le même espace. N'en faites pas trop, trop vite.
 Terrain de football
Terrain de football Terrain de baseball
Terrain de baseballVols supplémentaires
À présent que vous avez travaillé sur les pépins possibles et que vous vous sentez à l'aise en vol dans un environnement contrôlé, vous pouvez procéder à un deuxième vol.
- Étant donné que le drone n'est toujours pas complètement testé, nous vous conseillons d'engager une procédure complète pour le premier vol, ce qui devrait être assez rapide.
- En utilisant des mouvements fluides, habituez-vous à la façon dont le drone réagit à vos commandes, tout en le maintenant à une distance sécuritaire.
- Habituez-vous à piloter le drone sans l'aide du FPV ou de trop nombreux capteurs.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!