

Comment fabriquer un drone/UAV - Leçon 5 : Assemblage


- Comment fabriquer un drone/UAV - Leçon 1 : Terminologie
- Comment fabriquer un drone/UAV - Leçon 2 : Le châssis
- Comment fabriquer un drone/UAV - Leçon 3 : Propulsion
- Comment fabriquer un drone/UAV - Leçon 4 : Contrôleur de vol
- Comment fabriquer un drone/UAV - Leçon 5 : Assemblage
- Comment fabriquer un drone/UAV - Leçon 6 : Faites tout travailler ensemble
- Comment fabriquer un drone/UAV - Leçon 7 : Vol en immersion (FPV) et longue distance
- Comment fabriquer un drone - Leçon 8 : Avions
Maintenant que vous avez sélectionné tous les composants principaux de votre UAV, vous pouvez commencer l'assemblage. Ce guide va essayer de couvrir les erreurs courantes rencontrées lors de l'assemblage d'un UAV multi-rotors, ainsi que de fournir quelques conseils utiles concernant la configuration. Cette leçon ne couvre pas les éléments tels qu'un système de caméra/FPV, les dispositifs à longue portée ou d'autres accessoires (couverts dans la leçon 7). Les composants que vous devriez avoir à ce stade incluent :
- Le Châssis (acheté ou de fabrication personnelle)
- Les Moteurs,ESC, Hélices, Batterie, Chargeur
- Le Faisceau/carte de distribution d'alimentation
- Le Contrôleur de vol et le Système de communication (RC conseillé)
Système de propulsion
Pour les besoins de cette leçon, le système de propulsion de votre UAV impliquera les composants suivants :
- Moteurs
- Contrôleurs de vitesse électroniques (ESC)
- Distribution de l'alimentation (carte ou faisceau)
- Batterie
- Contrôleur de vol
Notez que les hélices ne sont pas dans la liste. Ne pas installer les hélices dans cette leçon ; les hélices ne seront raccordées qu'à la leçon 6. Comme il s'agit ici de votre premier multi-rotors, nous vous conseillons de réaliser une maquette du système électrique « hors du châssis » avant de le connecter au châssis, afin de vérifier facilement des connexions et problèmes éventuels.
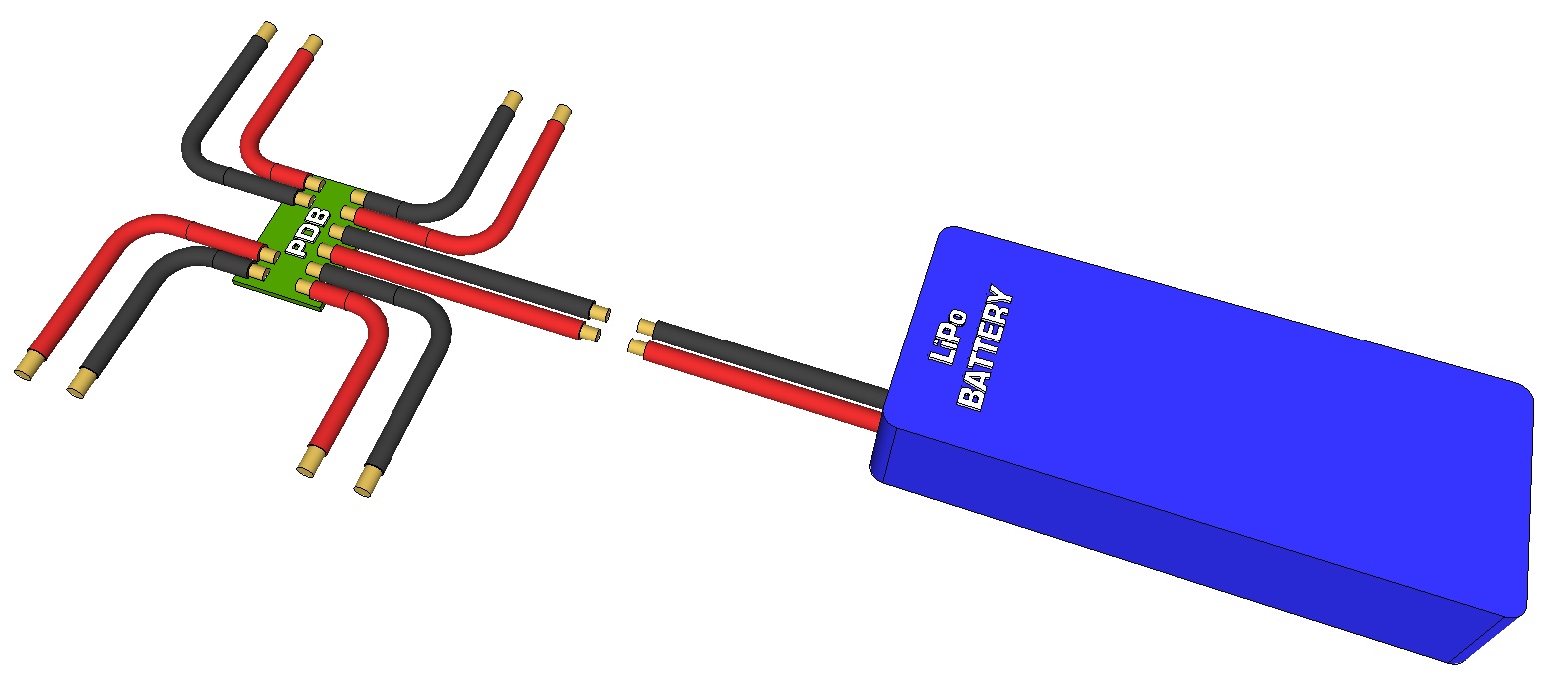
Batterie -> Distribution de l'alimentation
La connexion entre la batterie et le système de distribution de l'alimentation est relativement simple s'ils sont tous deux dotés des mêmes connecteurs. Vous pouvez vérifier que les deux s'emboîtent bien, passez ensuite à l'étape suivante. Si les connecteurs sont différents, NE PAS COUPER LES FILS POUR RETIRER LE CONNECTEUR DE LA BATTERIE ; cela peut entraîner un court-circuit et un choc électrique élevé particulièrement sévère. Au lieu de cela, vous pouvez rechercher un petit adaptateur ou câble adaptateur à placer entre le connecteur de votre batterie et le connecteur du boîtier de distribution d'alimentation. Une autre option consiste à rechercher le connecteur correspondant à celui de votre batterie et à le commander ; coupez le connecteur actuel du boîtier de distribution de l'alimentation et soudez le nouveau, tout en vous assurant qu'il n'existe aucune connexion entre les bornes positive et négative. Il est important de noter que la plupart des aéroplanes multi-rotors ne disposent pas d'un interrupteur de marche/arrêt, et que le courant est donc appliqué et enlevé par connexion et déconnexion de la batterie principale du boîtier de distribution de l'alimentation, c'est pourquoi les connecteurs doivent être solidement fixés et les fils/ points de soudure bien isolés, que ce soit par des gaines thermorétractables et/ou du ruban isolant.
 Distribution de l'alimentation vers la batterie
Distribution de l'alimentation vers la batterieDébranchez la batterie du boîtier de distribution de l'alimentation avant de continuer.
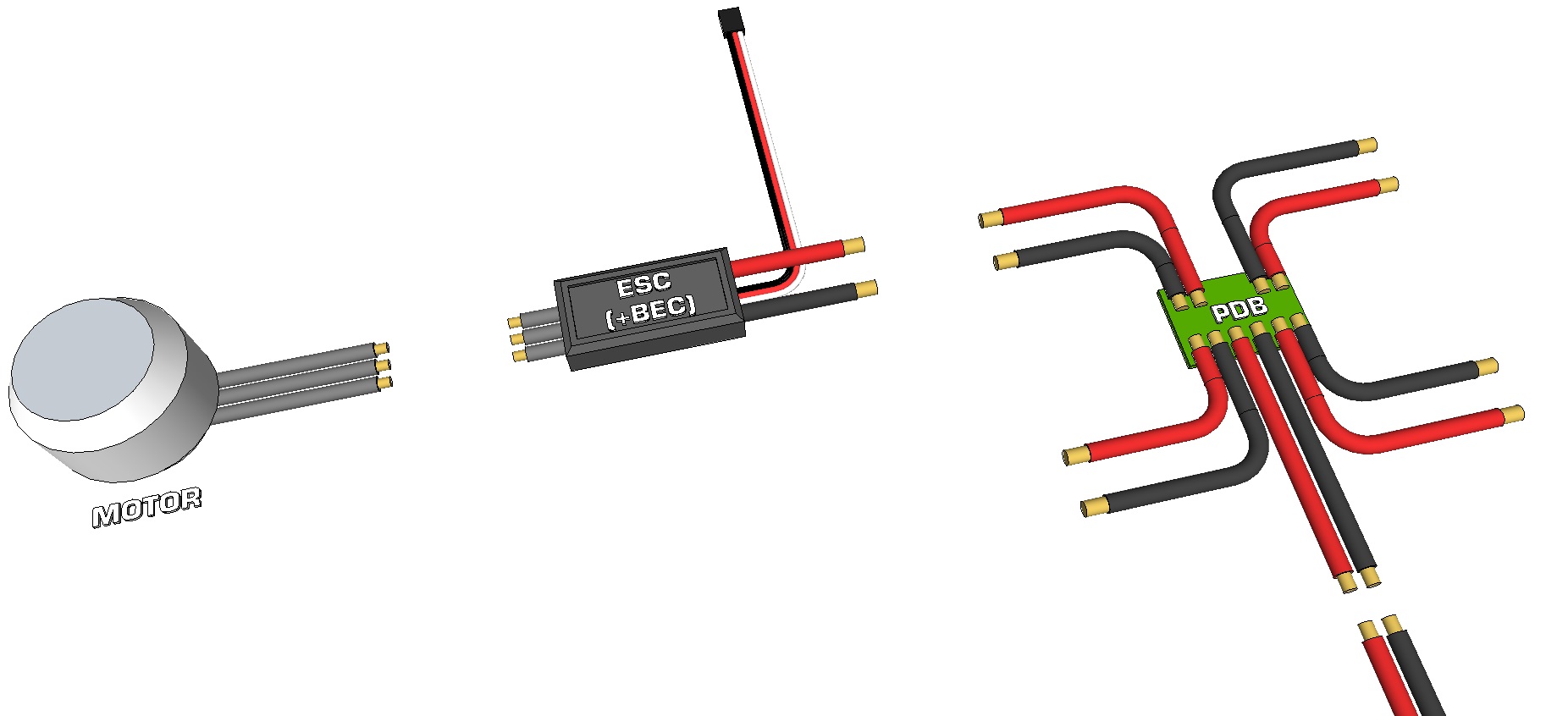
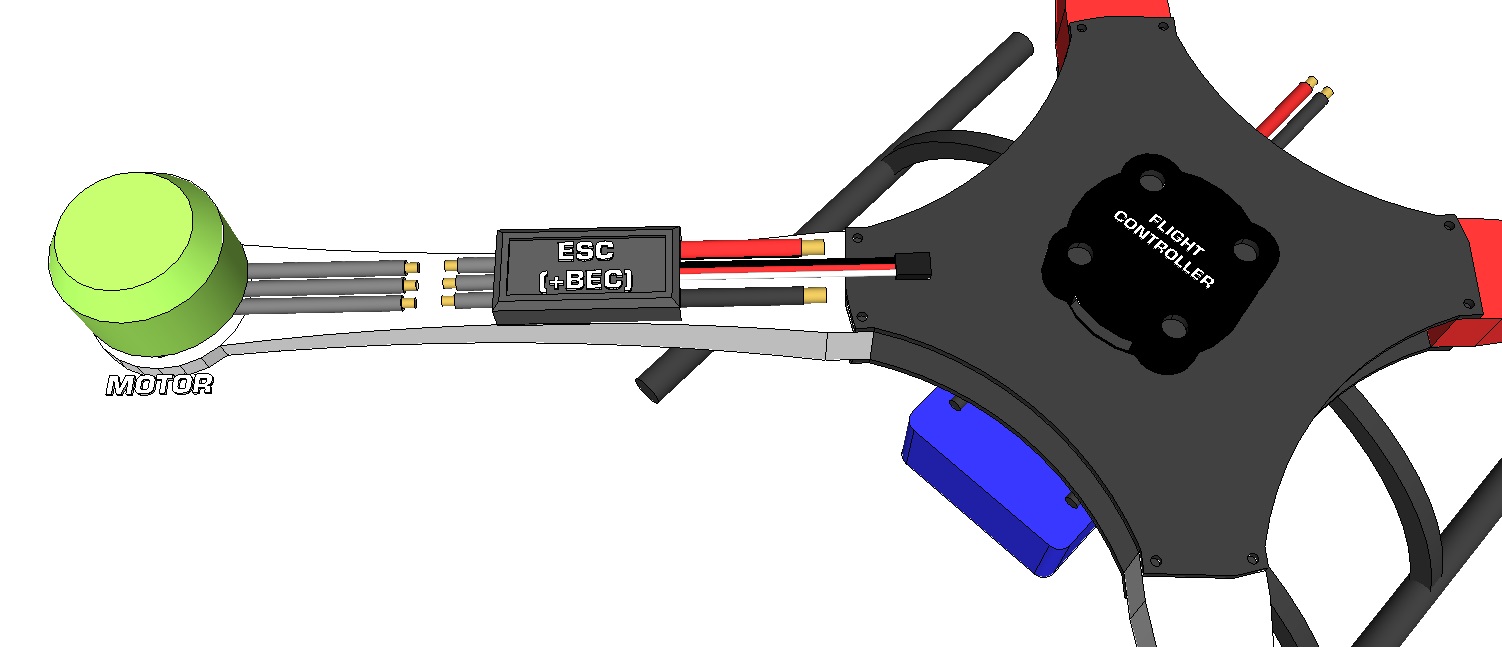
Moteur -> ESC -> Distribution de l'alimentation
Le câble/carte de distribution de l'alimentation (PDB) est principalement utilisé pour répartir la batterie principale sur chacun des ESC. La tension est fournie « telle quelle » aux ESC, il n'est donc pas nécessaire d'intensifier (augmentation) ou abaisser (diminution) la tension. Si votre multi-rotors utilise quatre moteurs, vous devriez avoir quatre ESC, et donc votre câble/carte de distribution de l'alimentation doit répartir la batterie principale sur au moins quatre connexions. Si votre PDB dispose de six connexions et que vous avez un quadricoptère, les deux restantes n'ont pas à être connectées. Si vous construisez un hexacoptère, votre PDB doit répartir la batterie principale sur au moins six connexions. Un ESC comporte les fils suivants :
- Un connecteur RC à 3 broches et à pas de 2,54 mm, pour lequel la broche noire est généralement GND, la broche rouge fournit le 5 V en SORTIE (via BEC*) et le connecteur jaune/blanc est pour le signal EN ENTRÉE
- 3 fils séparés à connecter aux trois fils d'un moteur CC sans brosse (normalement fournis avec des connecteurs à cosses femelles qui sont soit soudés soit inclus dans le package)
- Deux connecteurs d'entrée de batterie à brancher sur la PDB (certains incluent des connecteurs mâles à cosse soudés, d'autres sont compris dans le package, et d'autres ne sont tout simplement pas fournis)
* Les ESC disposent généralement de Circuits éliminateurs de batterie (BEC) intégrés qui convertissent la tension de la batterie à 5 V pour qu'elle soit utilisée par le récepteur et le contrôleur de vol. Le 5 V est généralement fourni par le connecteur RC de l'ESC (généralement la broche rouge centrale). Sur les servomoteurs RC, la broche rouge centrale est utilisée pour alimenter le servomoteur, mais sur un ESC, la broche rouge est une sortie de 5 V (qui fournit du 5 V). Vous n'avez besoin que d'un seul BEC pour alimenter le contrôleur de vol.
 Moteur vers ESC (avec BEC) puis vers distribution de l'alimentation
Moteur vers ESC (avec BEC) puis vers distribution de l'alimentationSi la PDB utilise des connecteurs différents de ceux utilisés sur l'ESC ou sur la batterie, vous devrez alors soit acheter des adaptateurs, soit acheter de nouveaux connecteurs et remplacer ceux de l'ESC ou de la PDB. Vous pouvez ainsi constater l'avantage de choisir une PDB dotée des mêmes connecteurs que vos ESC et batterie. Généralement, le connecteur d'une batterie LiPo RC à courant élevé est un connecteur DEANS rouge, un XT60 jaune ou un connecteur EC3 bleu. Le connecteur blanc JST de chargement de la batterie n'est pas connecté à la PDB. Si vous souhaitez alimenter des systèmes électroniques (système d'éclairage à DEL, cardan etc.) supplémentaires en courant faible, mais que votre carte de distribution de l'alimentation ne dispose d'aucune autre connexion de reste, vous pouvez envisager d'utiliser le câble de rechargement de la batterie. Le connecteur blanc de rechargement dispose généralement d'une broche GND, et d'une broche pour chaque cellule LiPo utilisée pour constituer le bloc batterie. Bien qu'il ne soit réellement conçu que pour charger, il fournit une sortie en 3,7 V sur chaque broche et peut être utilisé pour alimenter de l'électronique à courant faible, comme un système de cardan ou des DEL.
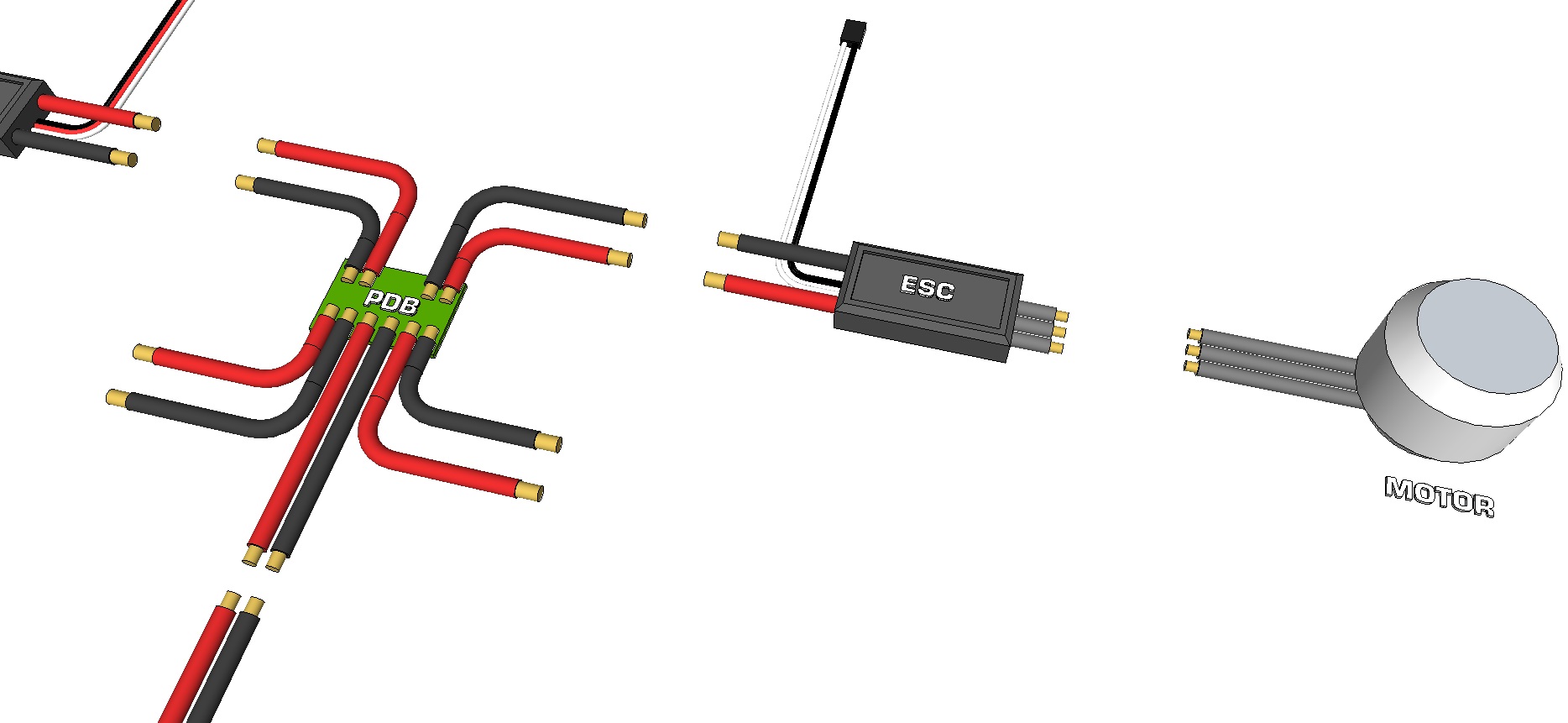 Moteur vers ESC (sans BEC) puis vers distribution de l'alimentation
Moteur vers ESC (sans BEC) puis vers distribution de l'alimentation- Retirez le fil rouge de tous les connecteurs RC à 3 broches de l'ESC à l'exception d'un. Nous vous conseillons de retirer la broche du connecteur de manière à ce que vous puissiez la reconnecter un peu plus tard si nécessaire. Enveloppez la broche libérée dans du ruban électrique ou une gaine thermorétractable, de sorte qu'elle n'entre pas en contact avec d'autres dispositifs électroniques. Celui avec le fil rouge toujours connecté alimentera votre contrôleur de vol.
- Connectez chacun des deux connecteurs d'entrée de votre ESC à la PDB, en vous assurant que le rouge va au positif (+) et que le noir va sur le négatif (-).
- Si votre PDB dispose de connecteurs RC, c'est à vous de décider si vous souhaitez connecter les broches RC de chaque ESC à cette carte, ou les connecter directement au contrôleur de vol.
- Connectez chacun des trois connecteurs à cosse du moteur aux trois connecteurs à cosse des ESC. Pour l'instant, la façon dont les trois broches du moteur se connectent aux trois broches de l'ESC n'a aucune importance (cela affectera le sens de rotation, ce qui sera corrigé plus tard si nécessaire).
Veuillez noter que si vous prévoyez d'organiser ou de masquer votre câblage, vous devrez peut-être modifier certaines des connexions suivant la procédure décrite dans la leçon 6, tout spécialement lors d'une inversion de connexions entre l'ESC et le moteur, pour faire tourner le moteur dans la direction opposée.
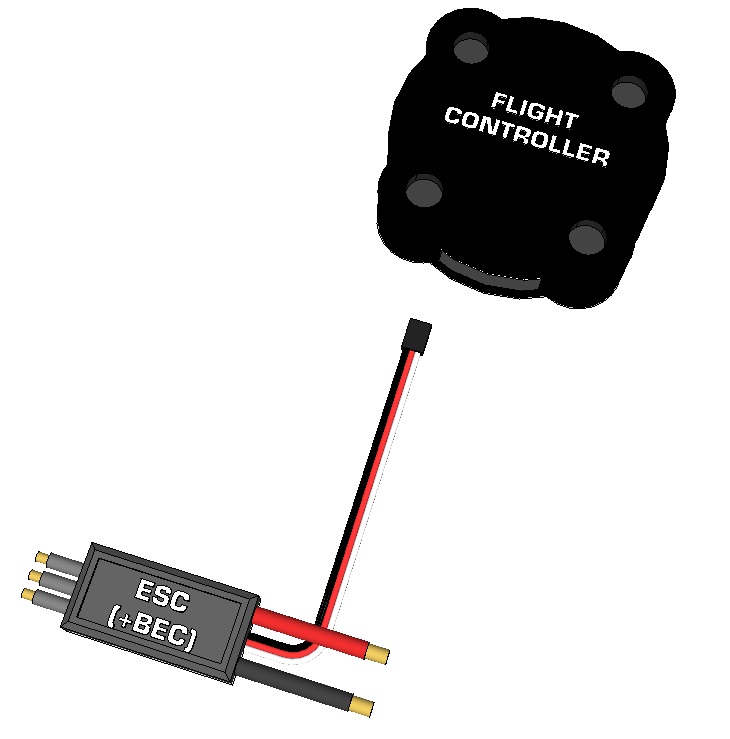
 Un seul ESC a le BEC connecté
Un seul ESC a le BEC connectéESC -> Contrôleur de vol
Vous pouvez à présent connecter l'entrée RC de l'ESCau contrôleur de vol. Le contrôleur de vol que vous choisissez doit avoir un schéma présentant quels moteurs de votre multi-rotors se connectent aux broches du contrôleur de vol. Le même schéma doit également indiquer le sens de rotation de chaque moteur, mais, une fois encore, pour l'instant, vous ne devez pas vous préoccuper de la direction.
- Consultez le schéma de raccordement entre le moteur/ESC et le contrôleur de vol, dans le manuel du contrôleur de vol
- Branchez les connecteurs RC de chaque ESC aux broches correspondantes sur le contrôleur de vol, en vous assurant que le fil de terre (normalement noir) se connecte à la broche de terre sur le contrôleur de vol, et que la broche de signal (blanche ou jaune) se connecte à la broche de signal sur le contrôleur de vol.
- Seul l'un des connecteurs RC doit toujours avoir la broche rouge (alimentation) connectée, peu importe lequel.
 ESC vers contrôleur de vol
ESC vers contrôleur de volCommunication
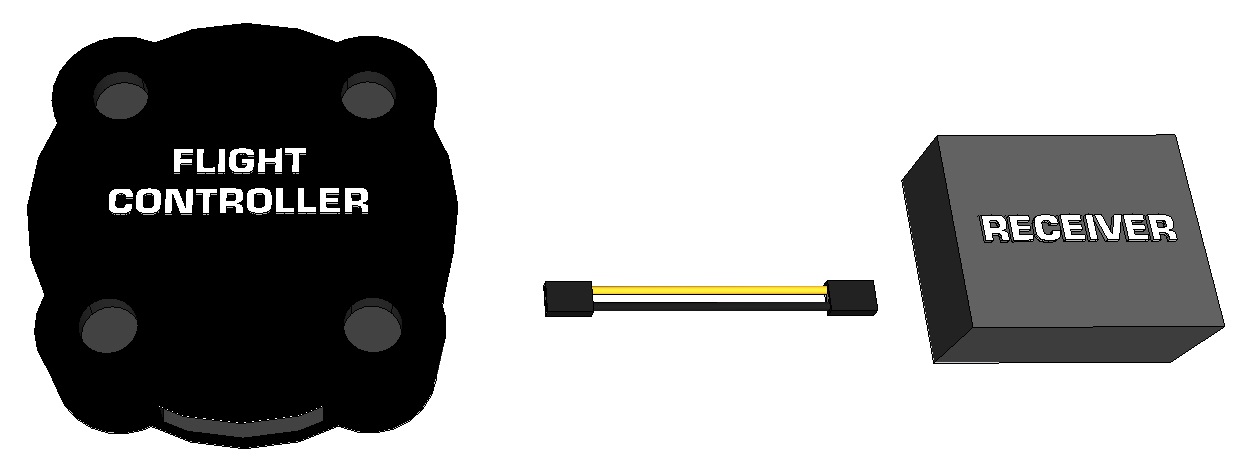
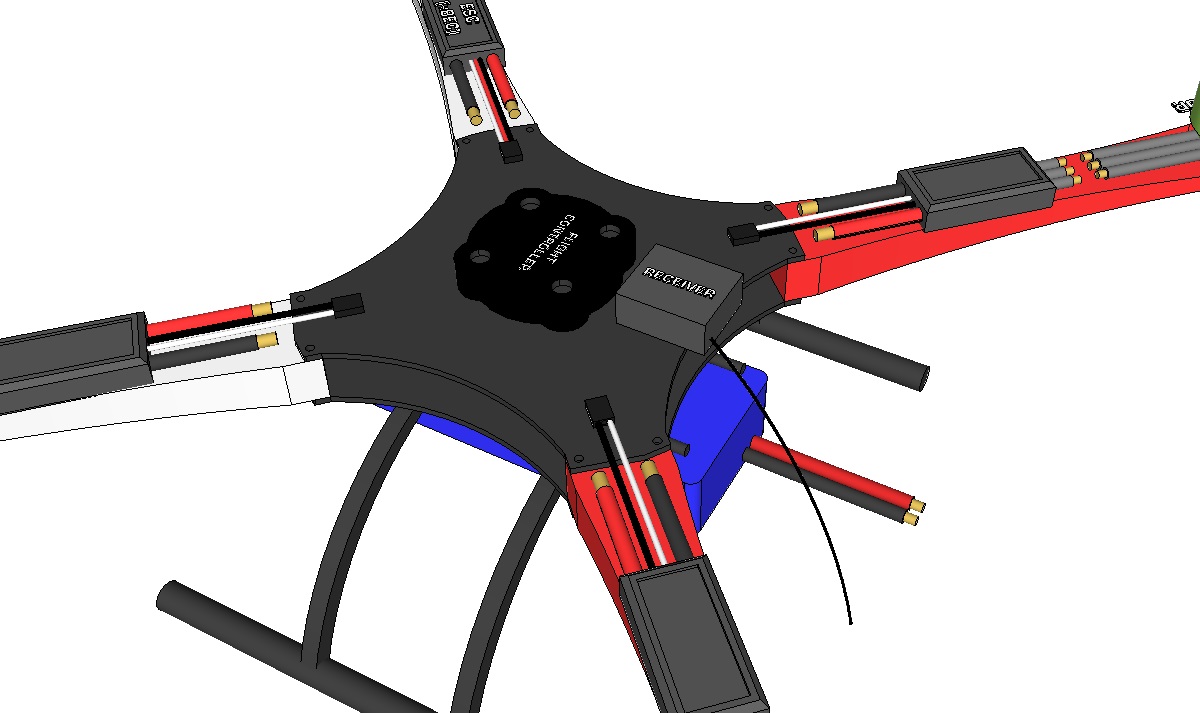
Récepteur -> Contrôleur de vol
Dans cette leçon, nous travaillerons sur l'hypothèse que vous avez choisi d'utiliser un contrôleur radio RC comme périphérique d'entrée. Si vous cherchez à utiliser le WiFi, le Bluetooth ou toute autre méthode en entrée, veuillez lire le manuel du contrôleur de vol et chercher une entrée série ; ce chapitre décrit comment/où brancher un périphérique série en entrée au contrôleur de vol. Vous aurez probablement besoin de localiser et de connecter les broches d'émission (Tx), de réception (Rx), de tension (5 V) et GND (de terre) du dispositif sans fil vers l'émetteur, en vous assurant que le Rx de l'un va au Tx de l'autre, et vice-versa. Votre Émetteur RC a dû vous être livré avec le récepteur RC approprié. Le récepteur a dû été lié à l'émetteur, c'est pourquoi vous pouvez retirer le cavalier de liaison du récepteur (s'il y en a un). Le colis peut également inclure un support de batterie AA destiné à alimenter le récepteur, mais nous n'en ferons pas usage puisque le BEC alimente à la fois le récepteur et le contrôleur de vol. Pour savoir quels canaux du récepteur RC se branchent sur quelles broches du contrôleur de vol, vous devez examiner à la fois le guide d'utilisation du contrôleur de vol et celui du système RC. Le manuel du contrôleur de vol précise les emplacements des broches suivantes qui doivent être appairées et connectées au récepteur :
- Accélération
- Tangage
- Lacet
- Roulis
- Auxiliaires (Aux.) 1, 2, 3 etc.
 Récepteur du contrôleur de vol
Récepteur du contrôleur de volVous pouvez à présent réaliser les connexions suivantes :
- Lisez le manuel du contrôleur de vol pour savoir quelle broche d'entrée RC est associée à chacune des fonctions ci-dessus
- Lisez le manuel de l'émetteur RC pour savoir quel canal est associé à chacune des fonctions
- Certains émetteurs RC peuvent être reprogrammés pour changer la fonction de chaque broche, donc, si vous décidez de changer ce que doit faire une broche (joystick ou interrupteur), assurez-vous de savoir quel canal sur le récepteur correspond à quelle fonction. Accélération, tangage, lacet et roulis doivent toujours être associés avec les deux joysticks, pas avec des interrupteurs ou des boutons.
- Connectez le canal d'accélération du récepteur à l'entrée d'accélération du contrôleur de vol
- Connectez le canal de tangage du récepteur à l'entrée de tangage du contrôleur de vol
- Connectez le canal de lacet du récepteur à l'entrée de lacet du contrôleur de vol
- Connectez GND sur le contrôleur de vol (généralement la troisième rangée de broches) à GND sur le récepteur (généralement la troisième rangée de broches)
- Si une entrée auxiliaire est utilisée, connectez Aux 1 du récepteur au Aux 1 du contrôleur de vol et ainsi de suite.
Vous pouvez utiliser des fils de servomoteur à trois broches pour chacun des canaux, mais un seul des canaux (n'importe lequel) doit avoir la tension et la masse ; les autres n'ont besoin que du câble de signal. Toutes les connexions peuvent avoir GND vers GND bien qu'une seule soit nécessaire. Encore une fois, le récepteur n'a pas besoin d'une batterie séparée puisqu'il sera alimenté par le contrôleur de vol, qui lui-même est alimenté par le BEC d'un des ESC.
Assemblage du châssis
Si vous construisez votre propre châssis, vous pouvez à présent l'assembler. Si vous avez acheté un kit châssis, suivez le guide d'assemblage. Veuillez noter que vous pouvez avoir besoin de démonter certaines zones pour faciliter le câblage ou pour l'organiser. L'objectif est de s'assurer qu'aucun câble n'est lâche, que tous les câbles sont correctement fixés et que rien ne peut tomber du châssis ou s'emmêler.
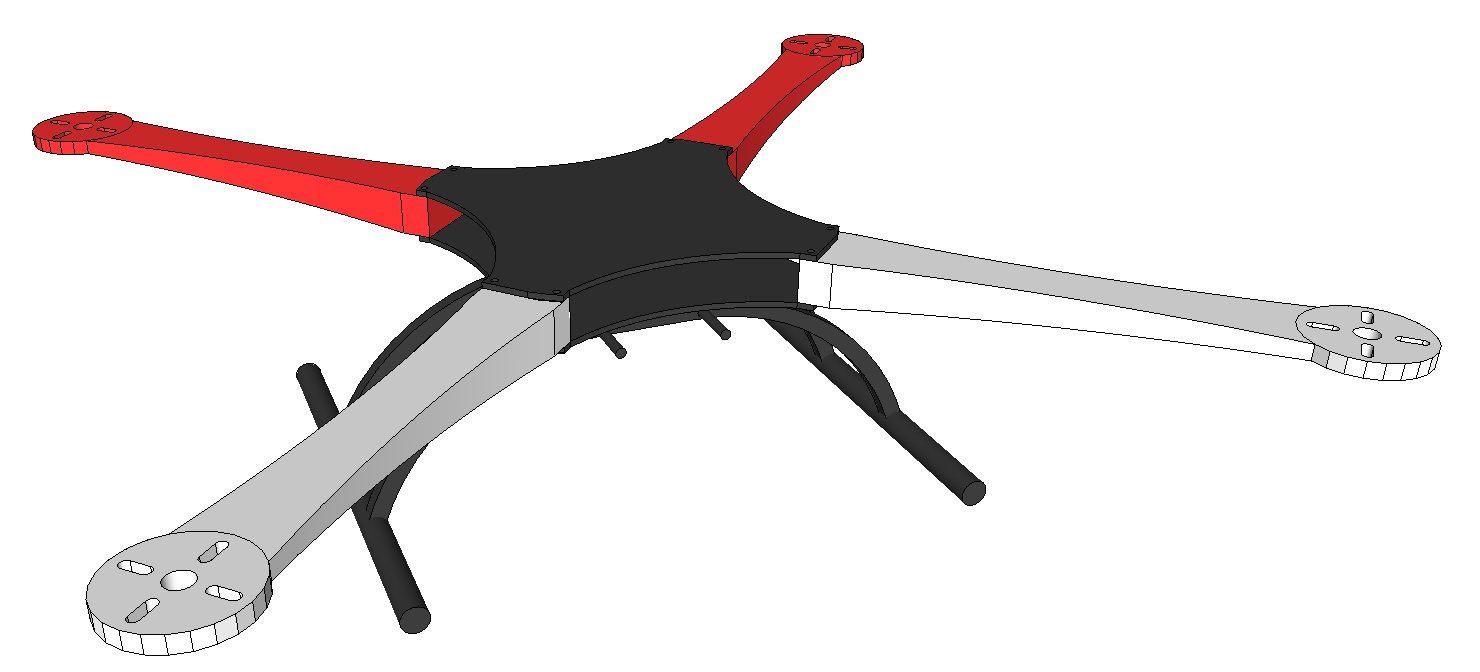 Châssis multi-rotors
Châssis multi-rotorsMontage
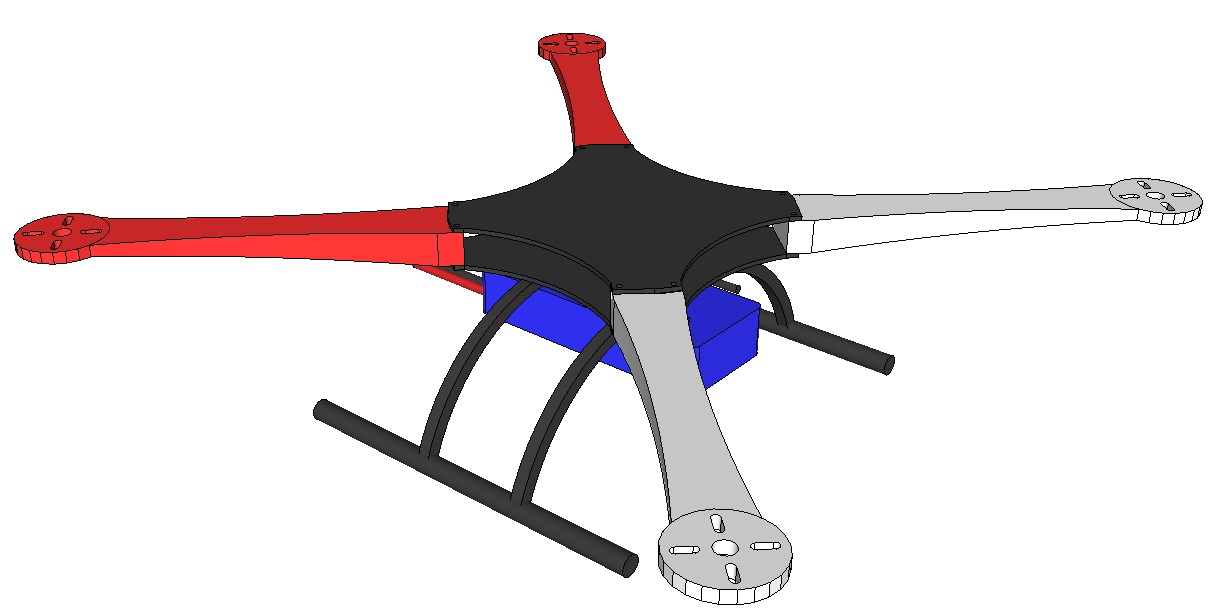
Placement de la batterie
La batterie utilisée pour alimenter un drone est souvent l'élément le plus lourd du drone, et peut souvent peser du quart à la moitié du poids total de l'appareil. En tant que tel, son emplacement de montage est donc très important. L'emplacement idéal de la batterie principale serait au centre de l'appareil, de façon à s'assurer que tous les moteurs ont à supporter plus ou moins la même charge. Si la batterie est placée plus vers l'arrière de l'appareil, les moteurs arrière devront fournir plus de poussée que les moteurs avant, et en tant que telle, la poussée totale maximale sera limitée (lorsque les moteurs arrière sont à pleine poussée, les moteurs avant ne le sont pas). Étant donné que l'approche normale d'une conception multi-rotors est d'avoir un appareil symétrique autour de l'axe central (ou au moins d'un axe), la batterie doit également être placée le long de cette ligne centrale, et non décalée vers un côté ou l'autre. Ensuite, vous devez déterminer à quelle hauteur placer la batterie. Il existe divers endroits où monter une batterie :
- Sous le châssis (appareil avec un fond plus lourd, plus stable et moins acrobatique).
- Juste en dessous des moteurs (généralement à l'intérieur du châssis) ; sans doute l'un des meilleurs endroits
- À la même hauteur que les moteurs ou que les hélices (par exemple monté sur la partie supérieure du châssis)
- Au-dessus des hélices (l'UAV aura une partie haute lourde et sera plus enclin à se retourner)
Pour la meilleure performance, le contrôleur de vol devrait idéalement être situé dans la position 3 décrite ci-dessus. La position 4 crée un effet de pendule inversé et, si l'hélicoptère s'incline au-delà d'un certain angle, il aura tendance à se retourner. La position 1 crée une plate-forme très stable, qui veut rester intrinsèquement de niveau et est très limitée en acrobatie. La plupart des concepteurs choisissent donc la position 2 et placent la batterie, soit juste en dessous du châssis, soit à l'intérieur. Cela libère de l'espace sous le châssis pour une charge utile telle un système à cardan, et de l'espace au dessus pour le contrôleur de vol et d'autres éléments électroniques qui sont alors plus accessibles.
 Placement/montage de la batterie
Placement/montage de la batterieMontage de la batterie
Il existe diverses manières communément admises pour fixer une batterie à un châssis et parmi celles-ci :
- Bandes Velcro
- Bandes Velcro adhésives (un côté fixé à la batterie et l'autre au châssis)
- Enfermée à l'intérieur du châssis
Les bandes Velcro sont les plus répandues en ce qui concerne les drones personnalisés « normaux » de taille moyenne alors que l'effet « cage » (enfermé dans un châssis) se retrouve le plus souvent sur les drones commerciaux dont les châssis ont souvent été moulés par injection et conservent un espace interne spécifiquement dédié à un modèle de batterie. Les bandes Velcro devraient idéalement n'être utilisées que si la batterie est relativement légère ; plutôt qu'une bande centrale, nous vous conseillons une bande le long de chaque longueur de la batterie. Si vous utilisez des bandes Velcro et estimez que la batterie peut glisser à cause d'une absence de frottement entre les bandes et la batterie, nous vous suggérons d'ajouter des bandes de caoutchouc à la zone des bandes en contact avec la batterie. Nous ne conseillons pas l'utilisation de la colle ou de tout autre adhésif pour fixer la batterie au châssis. Lorsque vous n'utilisez pas l'UAV, retirez la batterie et rangez-la dans un sac sécurisé LiPo ou un bol en céramique.
Chargement de la batterie
Il est très probable que vous ayez choisi un bloc batterie rechargeable Lithium Polymère (LiPo) ou un autre modèle à base de lithium. La plupart des batteries LiPo de plus de 3,7 V disposent d'un connecteur multi-broches séparé pour recharger la batterie, tandis que le connecteur principal peut être identifié comme ayant un connecteur à deux broches avec des fils plus gros, capables de gérer du courant de décharge élevé. Le connecteur de rechargement comporte généralement une broche pour chacune des cellules utilisées dans la batterie, ainsi qu'une broche de masse commune. En raison des dangers inhérents aux batteries LiPo (hydrogène et électricité), il est de pratique courante de retirer complètement la batterie du drone quand celui-ci n'est pas en cours d'utilisation et de la placer dans un sac sécurisé LiPo. Ce même sac est utilisé lors du rechargement de la batterie (branchez la batterie sur le chargeur, placez la batterie dans le sac (en laissant le chargeur à l'extérieur du sac) et scellez le sac, ils comprennent normalement un rabat avec Velcro).
Placement et montage du contrôleur de vol
Le contrôleur de vol devrait idéalement être situé au centre du drone à la même hauteur que les moteurs. Si cela s'avère impossible, alors le contrôleur peut être placé légèrement au-dessus ou au-dessous. Il faut éviter de monter le contrôleur de vol plus d'un côté que d'un autre, et de le monter plus vers l'avant ou l'arrière. Si vous avez acheté un châssis UAV, ils disposent souvent de trous de montage pour le contrôleur de vol qui sont positionnés à l'emplacement optimal. Le contrôleur de vol peut être fixé en utilisant l'un quelconque des procédés principaux suivants :
- Vis/ écrous/ entretoises (basique)
- Ruban adhésif double face (assurez-vous qu'il soit suffisamment résistant)
- Mousse adhésive double face (pour un effet amortisseur)
- Rondelles en caoutchouc (pour un réel effet amortisseur)
Quelques contrôleurs de vol incluent ou proposent en option un boîtier. Ce boîtier protège la carte du circuit imprimé de la poussière et de quelques gouttes de pluie, et peut supporter le plus gros d'un impact en cas d'accident. Certains boîtiers incluent des amortisseurs/rondelles en caoutchouc qui réduisent les vibrations causées par des moteurs/hélices déséquilibrés. La configuration idéale consiste en un châssis très rigide doté de moteurs et d'hélices parfaitement équilibrés et d'un contrôleur de vol bien amorti.
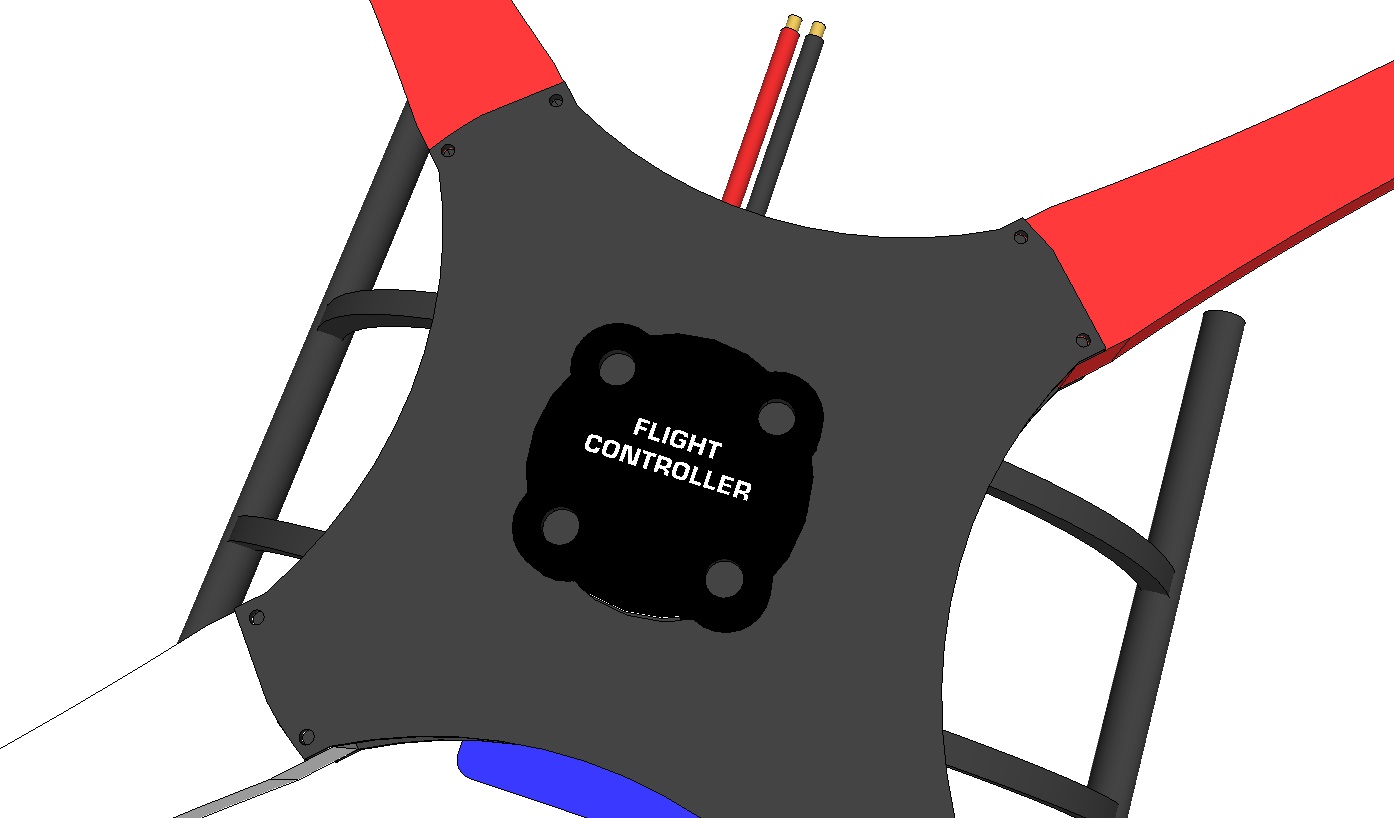 Contrôleur de vol sur châssis
Contrôleur de vol sur châssisPlacement et montage des ESC
Les ESC se connectent entre les moteurs, le câble/ carte de distribution de l'alimentation et le contrôleur de vol. La longueur du câble classique fourni avec l'ESC, combinée avec les câbles du moteur, fait que vous n'avez généralement pas besoin d'ajouter des extensions de câbles. Les ESC ont besoin de fournir un courant élevé et, en tant que tels, sont généralement très chaud lors de leur utilisation. L'emplacement idéal serait directement sous le souffle de l'hélice sur le bras de support : ce qui pousse l'air sur l'ESC et contribue ainsi à le refroidir. L'ESC peut être fixé à un bras de support au moyen d'attaches auto-bloquantes (une de chaque côté de l'ESC), d'un ruban, ou par presque toute autre méthode qui ne gênerait pas la dissipation de la chaleur. L'ESC ne doit pas être monté dans un endroit qui va limiter la dissipation de la chaleur (comme une boîte métallique fermée) et doit être placé loin des composants électroniques sensibles tels que le contrôleur de vol ou le récepteur.
 Montage d'un ESC et d'un moteur
Montage d'un ESC et d'un moteurAntenne et récepteur RC
Le récepteur RC peut être placé à peu près partout sur le multi-rotors, mais il est préférable de ne pas le placer trop près des fils transportant du courant élevé (donc loin de la batterie et des ESC). Les récepteurs inclus avec les systèmes RC ont tendance à ne pas avoir de méthode de montage spécifique, c'est pourquoi de l'adhésif double-face de qualité reste la meilleure option. L'antenne qui est fixée au récepteur est habituellement un fil flexible. Ce fil doit être situé de telle sorte qu'un signal sans fil ne soit pas perturbé, tout en le conservant aussi droit que possible. Coller l'antenne du récepteur le long d'un bras de support (sur un côté opposé aux fils de l'ESC) ou le long du train d'atterrissage, reste les meilleures options. Dans la leçon 6, nous parlerons plus longuement de la façon de tester la portée, ce qui doit être fait pour connaître la distance maximale à laquelle le récepteur capte un signal provenant de l'émetteur. Tester la portée peut nécessiter de tester différents emplacements pour le récepteur et l'antenne.
 Placement de l'antenne
Placement de l'antennePlacement et montage de l'antenne GPS
Contrairement à l'antenne fil du récepteur, l'antenne du récepteur GPS a tendance à être soit une antenne canard (pôle de plastique rigide fixe, ou à 90 degrés ou articulé) ou rectangulaire et relativement plate. Certaines unités GPS disposent d'une antenne intégrée (c'est à dire que l'antenne fait partie de la carte du circuit imprimé). Dans les deux cas, l'antenne GPS doit être montée sur la partie supérieure de l'UAV pour que les signaux des satellites ne soient pas bloqués. Le montage d'une antenne rectangulaire se fait généralement à l'aide de ruban adhésif double-face, et le montage d'une antenne canard implique généralement le forage d'un trou de montage. Si l'antenne canard se connecte directement au contrôleur de vol, aucun montage supplémentaire n'est nécessaire. À ce stade, votre multi-rotors devrait être totalement construit, assemblé et câblé, à l'exception des hélices. La Leçon 6 concerne la mise en place et le test de votre émetteur, le logiciel du contrôleur de vol, l'inspection d'avant vol et votre premier vol.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!