I might be breaking some LMR rules, but this robot was built on my spare time while funded by the University of Oslo and my employer APPLY Sørco, covering the hardware cost.<o:p></o:p>This robot was built to make bathymetric charts of lakes in Norway. It was initiated by my brother who is a professor at UiO. Totally disregarding my lack of engineering skills, an over estimating my programming / electronic skills he commissioned me to build ‘Whirligig’. The robot navigates according to GPS coordinates stored as waypoints on an onboard SD card. Logging GPS and water depths along its rout (every 10 sec.). The estimated runtime is 24 hour before it needs recharging of the 7 batteries.
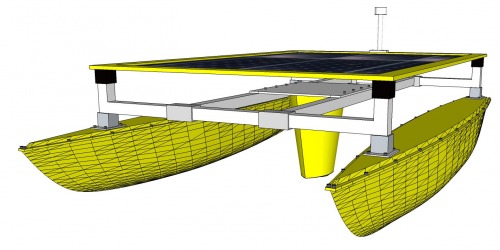
As you can see from the attached PDF file (in Norwegian only, sorry) am I working on a second version of this robot. This time using solar panels and a catamaran hull for more flexibility on payload and stability.
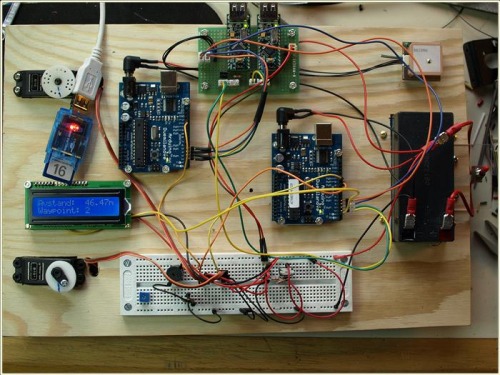
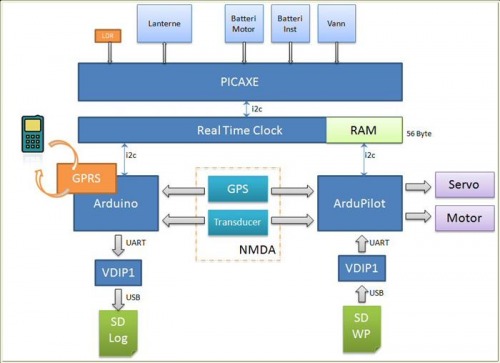
This is a block diagram of the control system
<o:p></o:p><o:p>
The original plan was using an ardupilot, but I ended up with using a regular arduino and building my own navigation software.
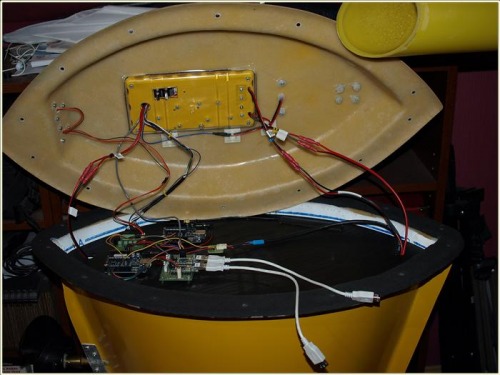
<o:p>Google sketchup of the design</o:p><o:p></o:p><o:p>Some images from the hull build</o:p><o:p></o:p><o:p></o:p><o:p></o:p><o:p></o:p>
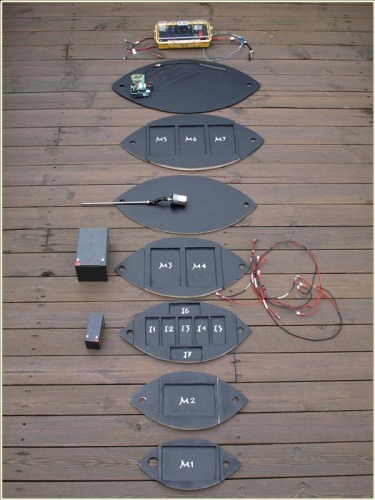
All the decks laid out showing the position of motor and instrumentation batteries
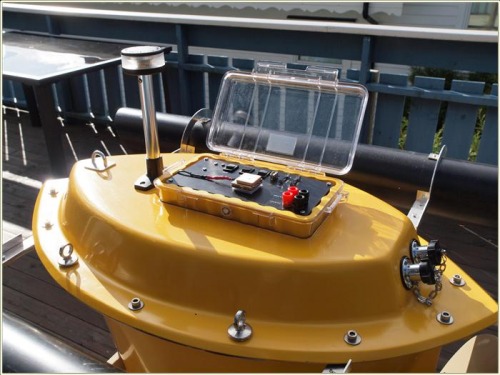
Waterproof box enbeded in the lid. Holding SD cards for waypoint and log data, GPS and charging plugs.
My daughter doing water intrusion test
I am currently building a Mark II version with a complete new hull. This version will be self-contained with power from solar cells and upload data and getting waypoints via a GPRS shield. This version will also have a full-size computer onboard, the fit PC2.
</o:p>
Mapping water depths in lakes
Actuators / output devices: Propeller, 600 RPM gear motor
Looks like a great job! Thanks for pointing out the fit PC2, I’ve never heard of it before but it seems really cool. I’m kinda obsessed with small fanless computers…
Also, as a respectable alternative to the PC2 there is also the Beagleboard. (http://beagleboard.org/) It’s open-source and everything, but you might find it more limiting because it’s really only meant to run Linux. But then again, if you’re used to Linux, thats great.
I’m used to program on the .NET platform so the fit PC2 with a full-blown Windows 7.0 would suit me fine. Whit the built in wireless I can control it (within range) by remote desktop. When it is on a mission, the communication will be based on GPRS.
This is the kind of project This is the kind of project that amazes me! Great looking and has cool features, the one I mostly like is the GPS navigation! Will look for more developments! Congrats
You mentioned wireless communications using remote desktop. You could use a USB cellular stick for laptops to get a longer range depending on the cellular network at your house or at its final location.
Wow, nice boat! I would Wow, nice boat! I would really like to know how you are going to tackle the GPS navigation via PC once you have that setup? On the Mark one the stabilizer looks really big, any reason for that? Looks like it will cause a lot of drag?
Handling the GPS from a PC Handling the GPS from a PC will probably be much easier since the Arduino has a limited string handling capabilities. The information from the GPS is just ASCII characters sent over a com port in accordance with the NMEA protocol.<o:p></o:p>The large center hull holds all the motor and instrumentation batteries. Giving it at total weight of 50kg. The aim was to set it as low in the water as we could so it wouldn’t drift from wind or weather. The hull is completely watertight so water can flow over it if it is hit by a wave. <o:p></o:p>
" Totally disregarding my lack of engineering skills, an over estimating my programming / electronic skills he commissioned me to build ‘Whirligig’."
It’s wonderful what people can do when they want to do something, even if they don’t know how to do it.
What you’ve shown is, despite not knowing where you’re going, or really how to get there, you applied yourself and did it.
What you DIDN’T have was people telling you that you couldn’t do it, or that the project was beyond your expertise - in fact, you had the opposite, and I think that was probably important.


 </o:p><o:p>
</o:p><o:p> 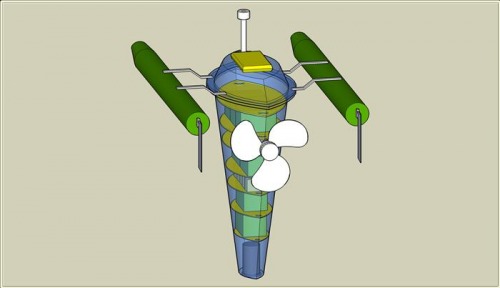 </o:p><o:p>Some images from the hull build</o:p><o:p>
</o:p><o:p>Some images from the hull build</o:p><o:p> </o:p><o:p>
</o:p><o:p> </o:p><o:p>
</o:p><o:p> </o:p><o:p></o:p>
</o:p><o:p></o:p>