



Whirligig
The robot navigates according to GPS coordinates stored as waypoints on an onboard SD card. Logging GPS and water depths along its rout (every 10 sec.). The estimated runtime is 24 hour before it needs recharging of the 7 batteries.
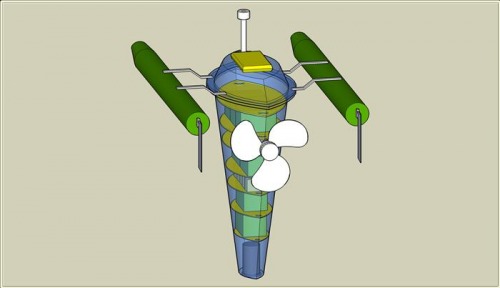
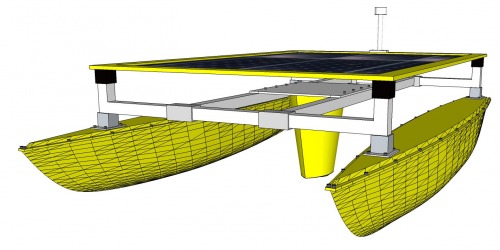
As you can see from the attached PDF file (in Norwegian only, sorry) am I working on a second version of this robot. This time using solar panels and a catamaran hull for more flexibility on payload and stability.
This is a block diagram of the control system
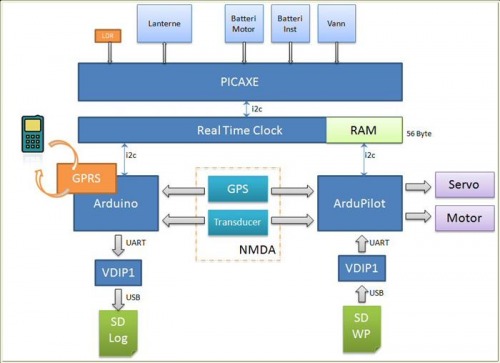
The original plan was using an ardupilot, but I ended up with using a regular arduino and building my own navigation software.



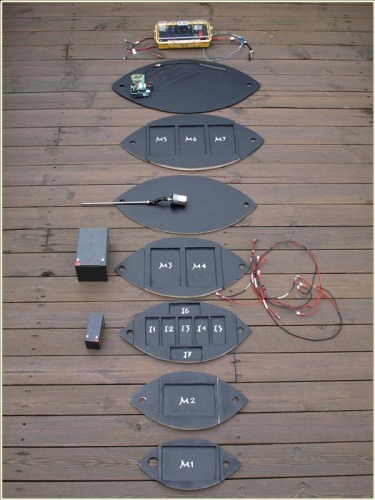
All the decks laid out showing the position of motor and instrumentation batteries
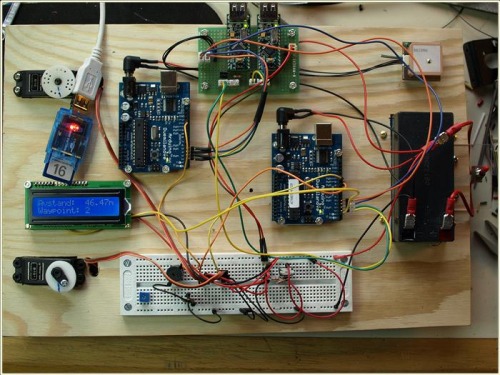
Testbed for instrumentation and navigation check.
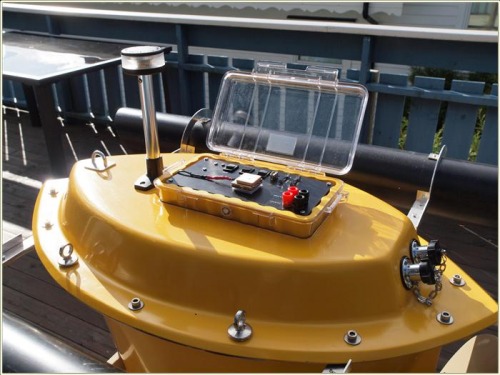
Instrumentation mounted in top deck and lid.
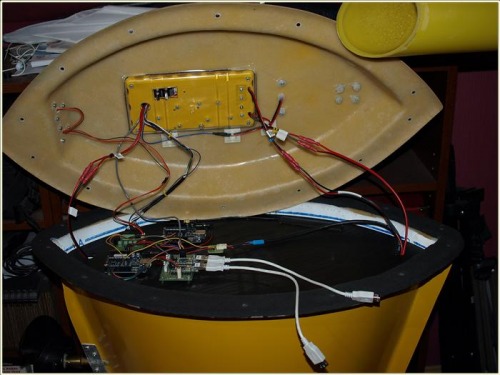
Waterproof box enbeded in the lid. Holding SD cards for waypoint and log data, GPS and charging plugs.
My daughter doing water intrusion test :-)

I am currently building a Mark II version with a complete new hull. This version will be self-contained with power from solar cells and upload data and getting waypoints via a GPRS shield.
This version will also have a full-size computer onboard, the fit PC2.
Mapping water depths in lakes
- Actuators / output devices: Propeller, 600 RPM gear motor
- CPU: Picaxe 28x1, Arduino
- Power source: 7 12V 12Ah batteries
- Programming language: Picaxe basic, Arduino C++
- Sensors / input devices: GPS, Transducer
- Target environment: Lakes, shore lines