But in your description you mention four servos and the ability to turn…
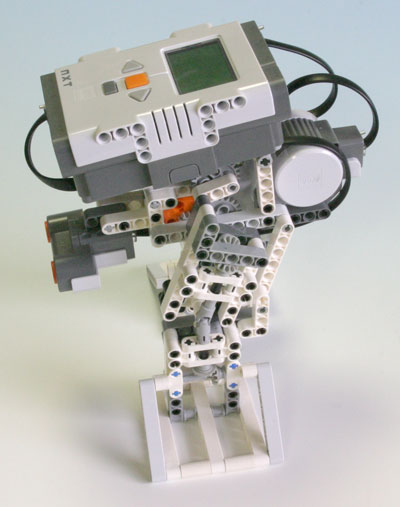
The video and pictures shows only one servo and it only walks in a straight line. Is this only the first sketch/mock-up of a robot still in the making?
I see you’ve changed your description… And here I was hoping you’d made some sort of DIY Lego hardware…
But tell me this: Are you Mr. Yoshihito Isogawa? Since you are posting pictures from Mr. Isogawas website I assume you are him. What happened to the running robot you was building in March? Since you’re posting an almost two year old robot now,I guess something bad happened…
I was stringing the guy along trying to see how good a liar he was.
Actually I found it through Legos NXTLog. They hosted a Biped Construction Challenge, and this particular biped was being shown as an excample for inspiration. With a short interview by the maker, and his name wasn’t Ethan Steininger, and he had never competed in the Maccabi Games…
b) That Mr. Isogawas username at picasaweb is Ethan Steininger
and
c)That the claim that the robot has four motors and can turn was a typo.
So in case we’re harrazing an innocent person, I’ll continiue to learn more about the robot… So, How do you use the TWO ultrasonic sensors you mention, how are they connected, and why use TWO? I cant understand from the NXT screen capture what they do…
Femininity Machines are nearly always female. Here, cars are almost always referred to as “her”. All my robots are female. But that’s because they’re stubborn … !