



Robot Marathan Runner: Contest for the Robot Olympics Challenge
I really want that Chassis as well as a SRF05 mount... Can't find one of those anywhere! Vote for meeeee! Please.
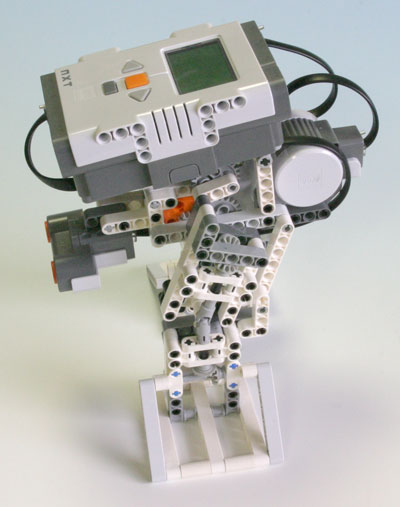
MINDSTORMS NXT using a two-legged walking robot.
In the center of gravity to move the ankle, knee bent and her feet to walk properly.
It Drags it's feet, the soles are almost non-skid the brackets along the weather. So, the robot walks straight
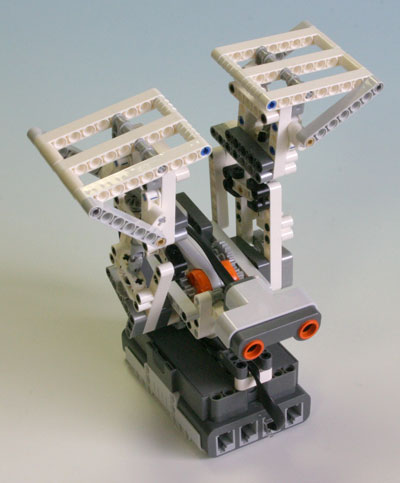
Beam with a raised tile Blocks,
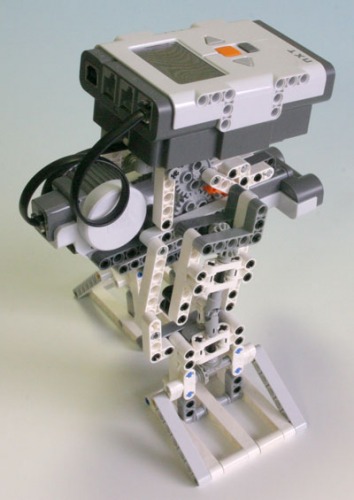
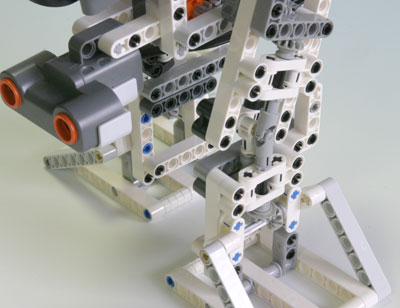
The robot from behind, with two ultrasonic sensors in front to detect things ahead
it can detect objects up to 30cm ahead.
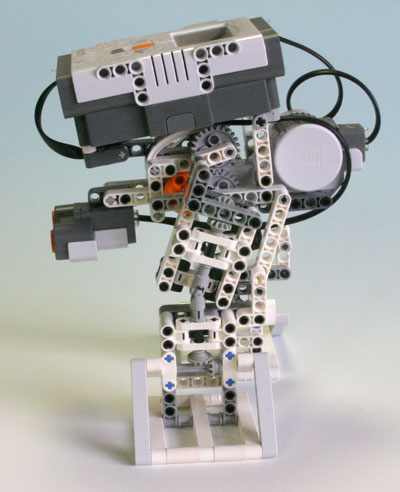
Knees and ankles zoomed in.
Navigate around via Infared
- Control method: autonomous
- CPU: Lego Mindstorm NXT
- Power source: Ni-MH batteries (7.2v total)
- Sensors / input devices: Infared
- Target environment: Indoor or outdoor