Hi, giannhsitia! Long time no see you… Nice to see you back here. I’ve abandoned a little my biped projects, but your project seems to have awakened my desire to return to the bipeds. What I can say… Nice project! And nice new walking gait.
Nice! How much payload can something like that carry on top. Wondering if I can find some legs that could carry about 8 lbs and still walk/balance. Is this entirely unrealistic?
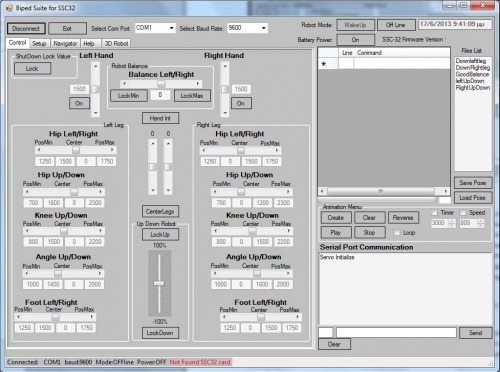
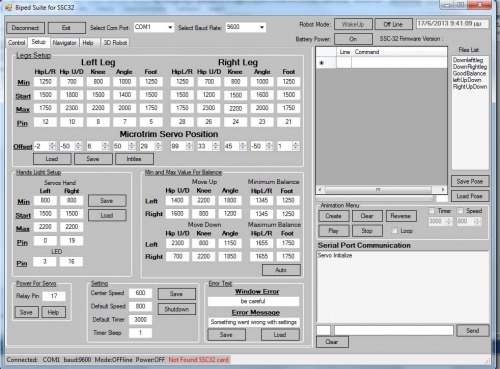
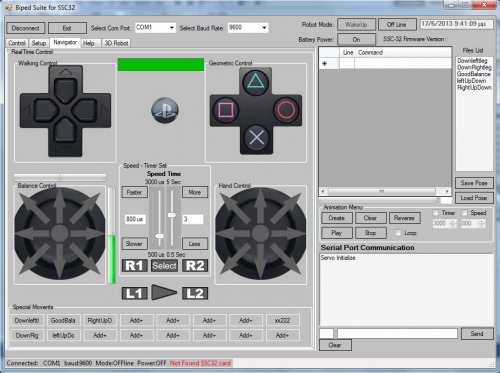
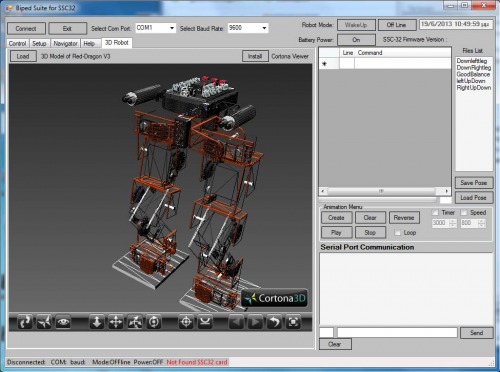
Really nice looking biped, like the predator style with the wires. And something I really like its your software maybe I’ll borrow some of your ideas for my robot arm controller, since I’m currently doing it in separate windows and got problems passing connection object between them, think I’ll use a tabbed pane just like you. =)
thanks for your new link, but I test it in studio 2015 and 2012, I was many error and refused to execute it; I’m not a good user of windows bwindows studio; if you are a idea please help for exuted it