

UPDATE MARCH 18 2014: Well, it's been silent in that project since it was finished. Now, after EL2ISA2 broke down because of a leaking battery he was waiting to be re-born. That time has come now. I proudly present the new main board for EL2ISA2

(Click on the pictures to get the big size.)
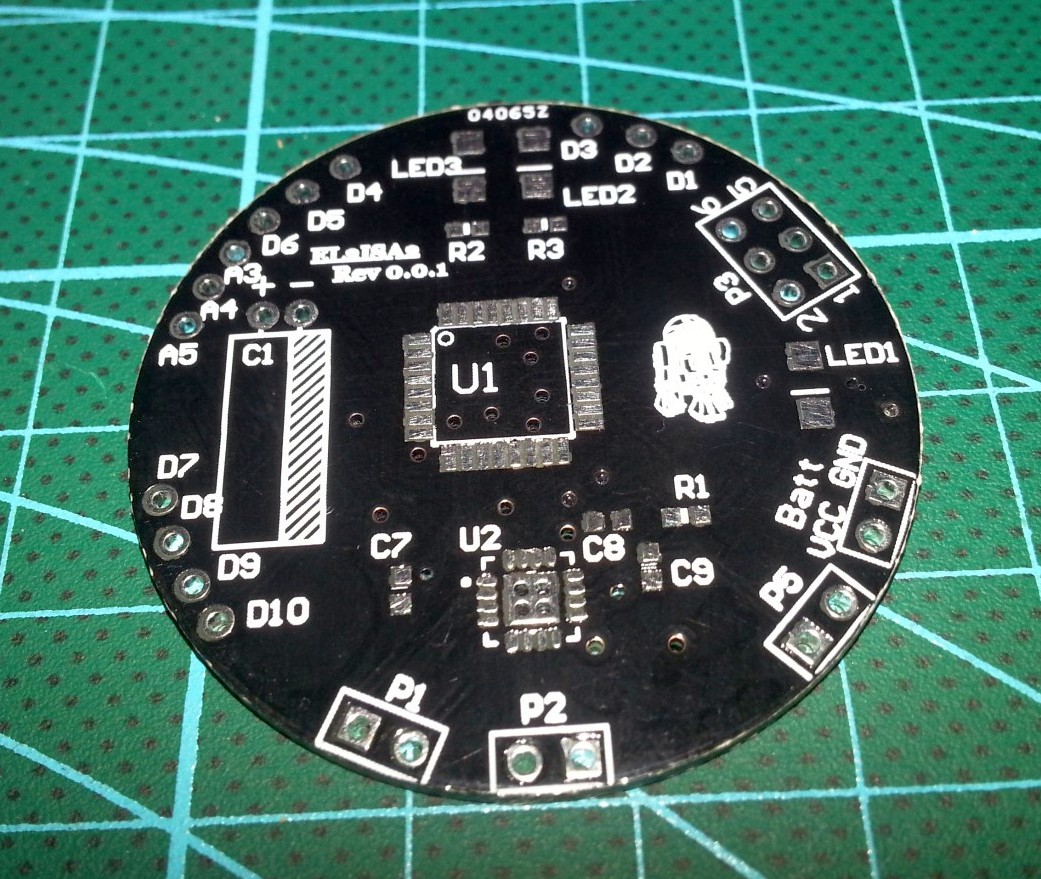
Left is the top side and right is the bottom side. U1 is a Atmega8 (but maybe a Atmega328) as the brain and U2 is a DRV8833 as motor driver. A MicroSD card MP3 module is waiting to give EL2ISA2 a voice. Now I still need time to put it together.
The new EL2ISA2 will get his own entry, so that one still stays "Done"
Older entries here:
Finally I got my own one. Thanks to my friend sending the mint candy can in R2D2 shape all the way from Germany to me at Shanghai. As a special thanks I named it after my friend.
Well, what to say. It's a metal can, the brain is an ATTiny85, the mucle is a L293D to drive this two tiny gear motors. Powered is the whole thing by just one LiPo battery 3.7V/200mAh.
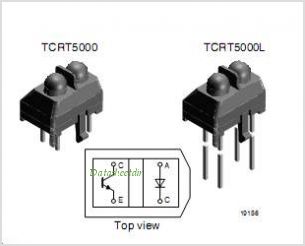
Again, it's a proofe of concept what can be done with the ATTiny and some other components. Right now it's just doing the test program and driving around by changing the direction each 2 seconds. The tricky thing is, I just have one I/O pin left for a sensor. Later (probably tomorrow) I will try to get an IR sensor working. It's a TCRT5000, similar to the Sharp but much smaller. Any suggestions with that? Or just use a pair of IR LEDs?
Ok, enough writing...here comes the pictures (FYI: The videos are identical. The one on youku is just for the Chinese people since youtube is blocked here):
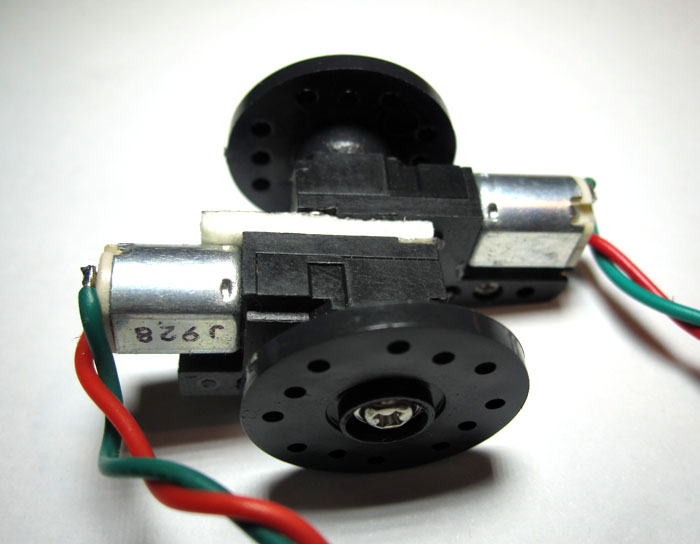
Gear motors
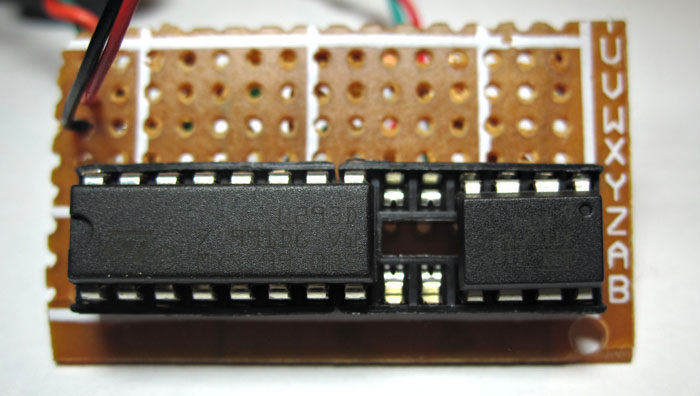
DIY board. Did not have a 16 pin socket for the L293D so I combined what I had and made this multi-chip-socket ;-) for ATTiny85 and L293D
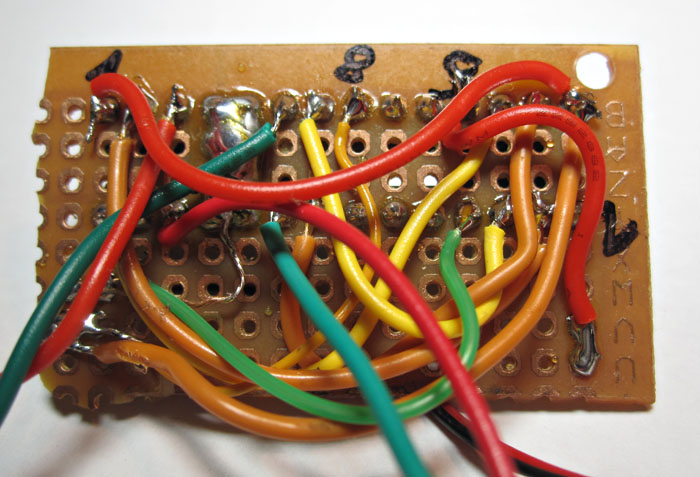
No comment to this :-S
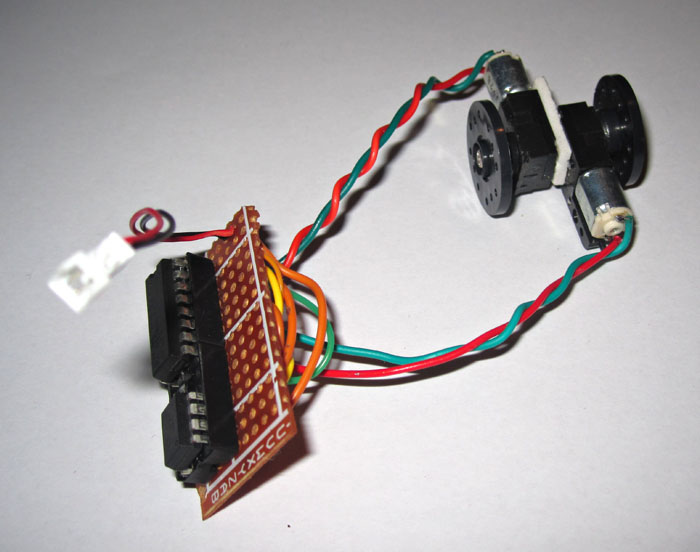
Wired up and ready for test run.

Still space in the can (my wife was complaining "Why not that R2D2 sound?) I am open for suggestions...I was thinking to put an additional sound thingy in and trigger it with maybe every time when it turns left...
Todo:
1. give him some eyes (see picture below) -> DONE
2. make him pretty with a bunch of LEDs -> DONE
3. give him a voice...just some beeps -> still searching for the right sound module
Problem solved. I don't know exactly what it was but after soldering the LEDs in the whole thing just worked ;-)
New video is coming soon up now!!!
UPDATE: March 28:
Test of operation time. Given the full charged LiPo 3.7V/200mAh the little can is running for 1:50 hours with no break. Loads are the ATTiny, L293D, 2x LED. The running program is the one I attached here.
UPDAT MARCH 31:
Got the AtTiny singing "do re me fa so la ti do". Found the code for the sound function here: http://web.media.mit.edu/~leah/LilyPad/07_sound.html Now have to find out in what frequency Artoo is beeping and aso it's tone lenght to write a sequence of his beep's.
UPDATE APRIL 1/2:
As you know I let my robots also have fun...they need to get out sometimes too. Last Thursday EL2ISA2 got the chance to play pool. See the new video!!!
There is hope: http://item.taobao.com/item.htm?id=14179917693
UPDATE APRIL 5:
The sound module is working and the video is up loading. As soon as the video is finished you should be able to watch it here. I am sleeping now. ;-)
EPILOG:
Later I will update the link to the sound module, since I was using another one. After this project I realized that my hands are just too big for such tasks :-)
Finally I got the sound module running. It's not holding the recored sound when the power is off, so i attached a small LiPo 3.7V/70mAh on it to feed it permanently. One motor pin for the right motor reverse function acts as a trigger. When forward is LOW then it triggers the sound. The sound module and the Attiny shares a common ground.
Recording sound with the microphone sucks since the quality and volume is very low. So I just plugged it into the earphone plug of the computer and recorded it with volume set to 20%...good enough.
PROJECT SUCCESSFUL DONE!!!
Drive around, avoid obstacles and beeps with R2D2 sound when facing an obstacle
- Actuators / output devices: 2x tiny gear motors, 2x LED, 1x speaker
- Control method: autonomous
- CPU: attiny85
- Operating system: Arduino ISP
- Power source: 1x LiPo 3.7V 200mAh, 1x LiPo 3.7V/70mAh
- Programming language: Arduino ISP
- Sensors / input devices: IR sensor
- Target environment: table, indoos
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/el2isa2
 Yep, the balance is one thing which is easy to handle with this kind of construction
Yep, the balance is one thing which is easy to handle with this kind of construction 
