



EL2ISA2
UPDATE MARCH 18 2014: Well, it's been silent in that project since it was finished. Now, after EL2ISA2 broke down because of a leaking battery he was waiting to be re-born. That time has come now. I proudly present the new main board for EL2ISA2

(Click on the pictures to get the big size.)
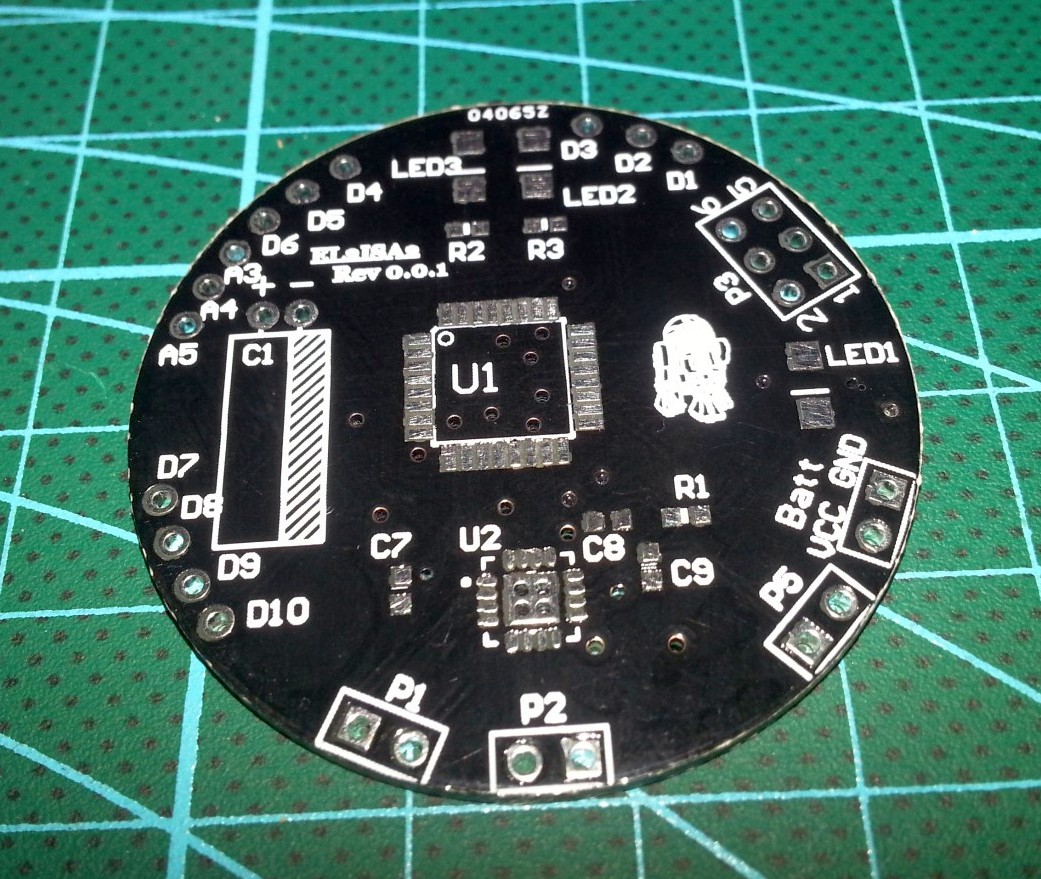
Left is the top side and right is the bottom side. U1 is a Atmega8 (but maybe a Atmega328) as the brain and U2 is a DRV8833 as motor driver. A MicroSD card MP3 module is waiting to give EL2ISA2 a voice. Now I still need time to put it together.
The new EL2ISA2 will get his own entry, so that one still stays "Done"
Older entries here:
Finally I got my own one. Thanks to my friend sending the mint candy can in R2D2 shape all the way from Germany to me at Shanghai. As a special thanks I named it after my friend.
Well, what to say. It's a metal can, the brain is an ATTiny85, the mucle is a L293D to drive this two tiny gear motors. Powered is the whole thing by just one LiPo battery 3.7V/200mAh.
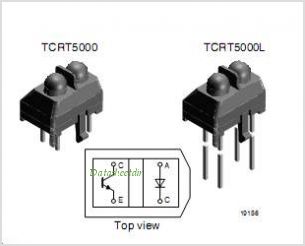
Again, it's a proofe of concept what can be done with the ATTiny and some other components. Right now it's just doing the test program and driving around by changing the direction each 2 seconds. The tricky thing is, I just have one I/O pin left for a sensor. Later (probably tomorrow) I will try to get an IR sensor working. It's a TCRT5000, similar to the Sharp but much smaller. Any suggestions with that? Or just use a pair of IR LEDs?
Ok, enough writing...here comes the pictures (FYI: The videos are identical. The one on youku is just for the Chinese people since youtube is blocked here):
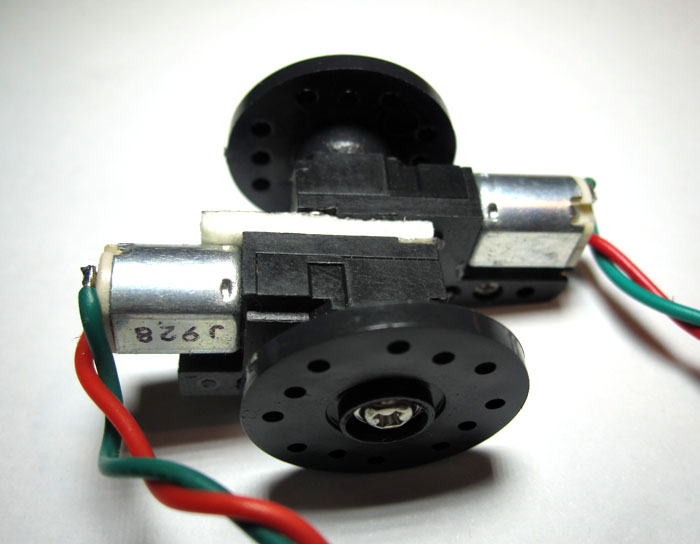
Gear motors
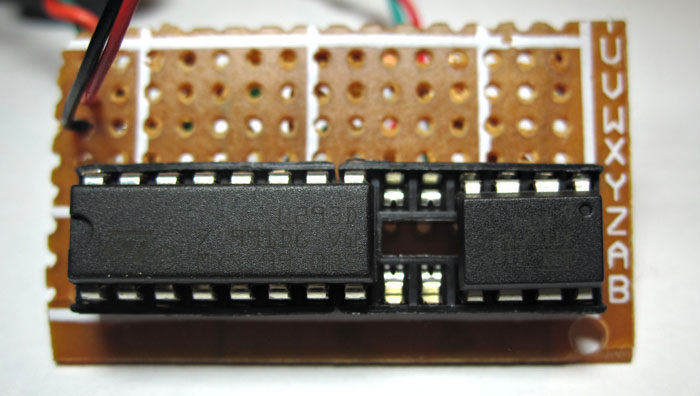
DIY board. Did not have a 16 pin socket for the L293D so I combined what I had and made this multi-chip-socket ;-) for ATTiny85 and L293D
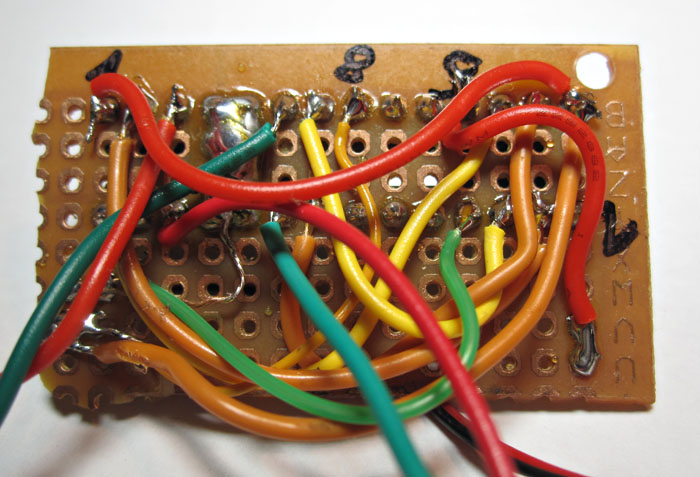
No comment to this :-S
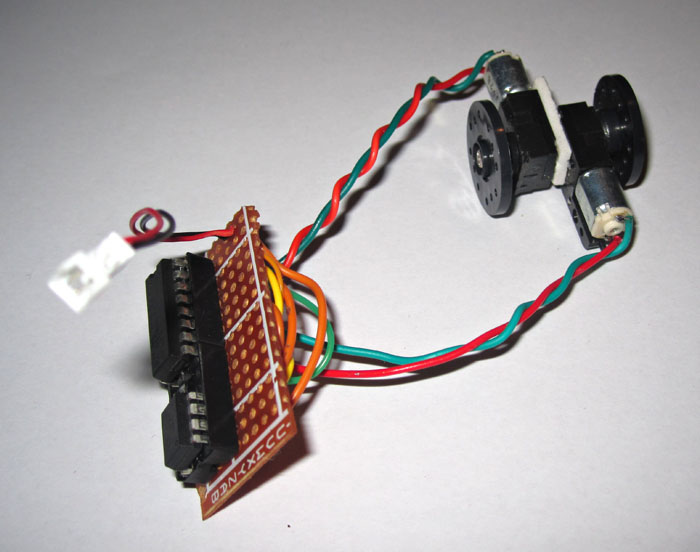
Wired up and ready for test run.

Still space in the can (my wife was complaining "Why not that R2D2 sound?) I am open for suggestions...I was thinking to put an additional sound thingy in and trigger it with maybe every time when it turns left...
Todo:
1. give him some eyes (see picture below) -> DONE
2. make him pretty with a bunch of LEDs -> DONE
3. give him a voice...just some beeps -> still searching for the right sound module
Problem solved. I don't know exactly what it was but after soldering the LEDs in the whole thing just worked ;-)
New video is coming soon up now!!!
UPDATE: March 28:
Test of operation time. Given the full charged LiPo 3.7V/200mAh the little can is running for 1:50 hours with no break. Loads are the ATTiny, L293D, 2x LED. The running program is the one I attached here.
UPDAT MARCH 31:
Got the AtTiny singing "do re me fa so la ti do". Found the code for the sound function here: http://web.media.mit.edu/~leah/LilyPad/07_sound.html Now have to find out in what frequency Artoo is beeping and aso it's tone lenght to write a sequence of his beep's.
UPDATE APRIL 1/2:
As you know I let my robots also have fun...they need to get out sometimes too. Last Thursday EL2ISA2 got the chance to play pool. See the new video!!!
There is hope: http://item.taobao.com/item.htm?id=14179917693
UPDATE APRIL 5:
The sound module is working and the video is up loading. As soon as the video is finished you should be able to watch it here. I am sleeping now. ;-)
EPILOG:
Later I will update the link to the sound module, since I was using another one. After this project I realized that my hands are just too big for such tasks :-)
Finally I got the sound module running. It's not holding the recored sound when the power is off, so i attached a small LiPo 3.7V/70mAh on it to feed it permanently. One motor pin for the right motor reverse function acts as a trigger. When forward is LOW then it triggers the sound. The sound module and the Attiny shares a common ground.
Recording sound with the microphone sucks since the quality and volume is very low. So I just plugged it into the earphone plug of the computer and recorded it with volume set to 20%...good enough.
PROJECT SUCCESSFUL DONE!!!
Drive around, avoid obstacles and beeps with R2D2 sound when facing an obstacle
- Actuators / output devices: 2x tiny gear motors, 2x LED, 1x speaker
- Control method: autonomous
- CPU: attiny85
- Operating system: Arduino ISP
- Power source: 1x LiPo 3.7V 200mAh, 1x LiPo 3.7V/70mAh
- Programming language: Arduino ISP
- Sensors / input devices: IR sensor
- Target environment: table, indoos