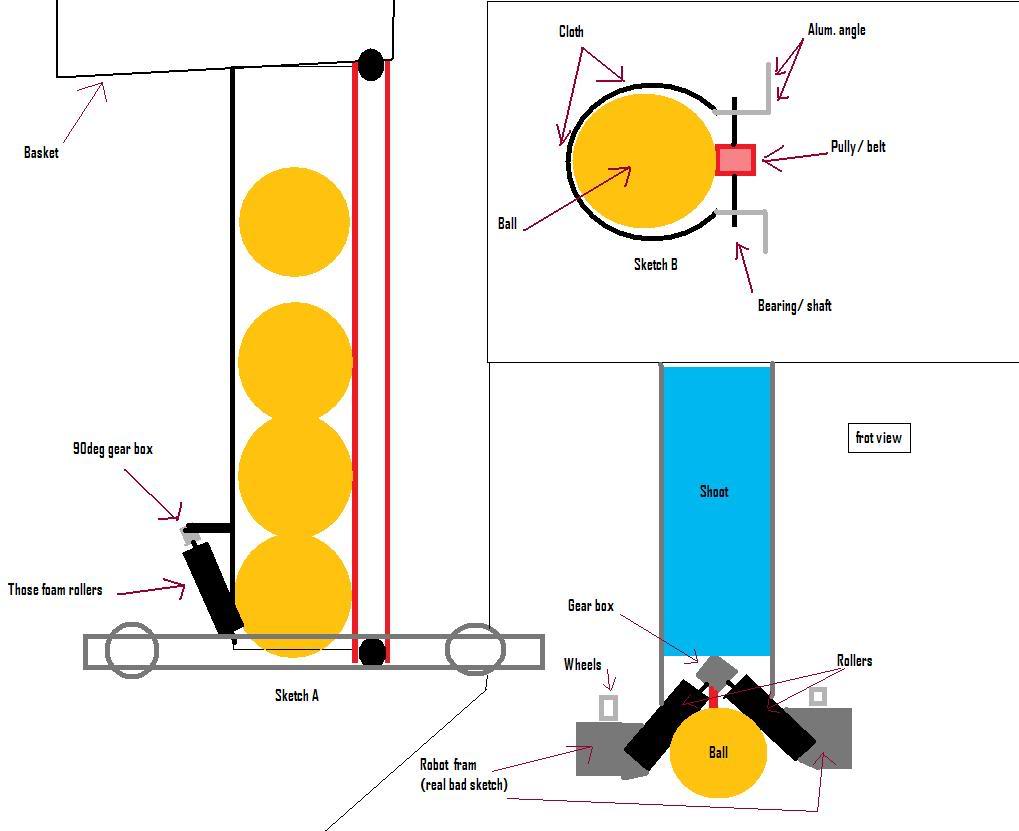
Ok this year we had to design a robot that could successfully collect these “moon rocks” and then deposit them in the trailer of the opposite alliance.
Sounds pretty simple but!!!
It has to weigh less then 120lbs, fit in a 28”x38”x60” box, use only specified motors and pneumatics (we used no pneumatics this year), use only a certain battery, and a hole list of other rules (three ring binder full). But still you have a lot of freedom to design whatever you want. Oh and we only had six weeks and a budget that is set by FIRST. It’s all to keep things equal though so it’s cool.
Andrew Early (remember that name) and I basically designed the thing during lunch and after school for a week straight. It got very intense at times because there are so many different ways to accomplish the task given to us. Upon finalizing the designs we started to scavenge for parts and assemble things.
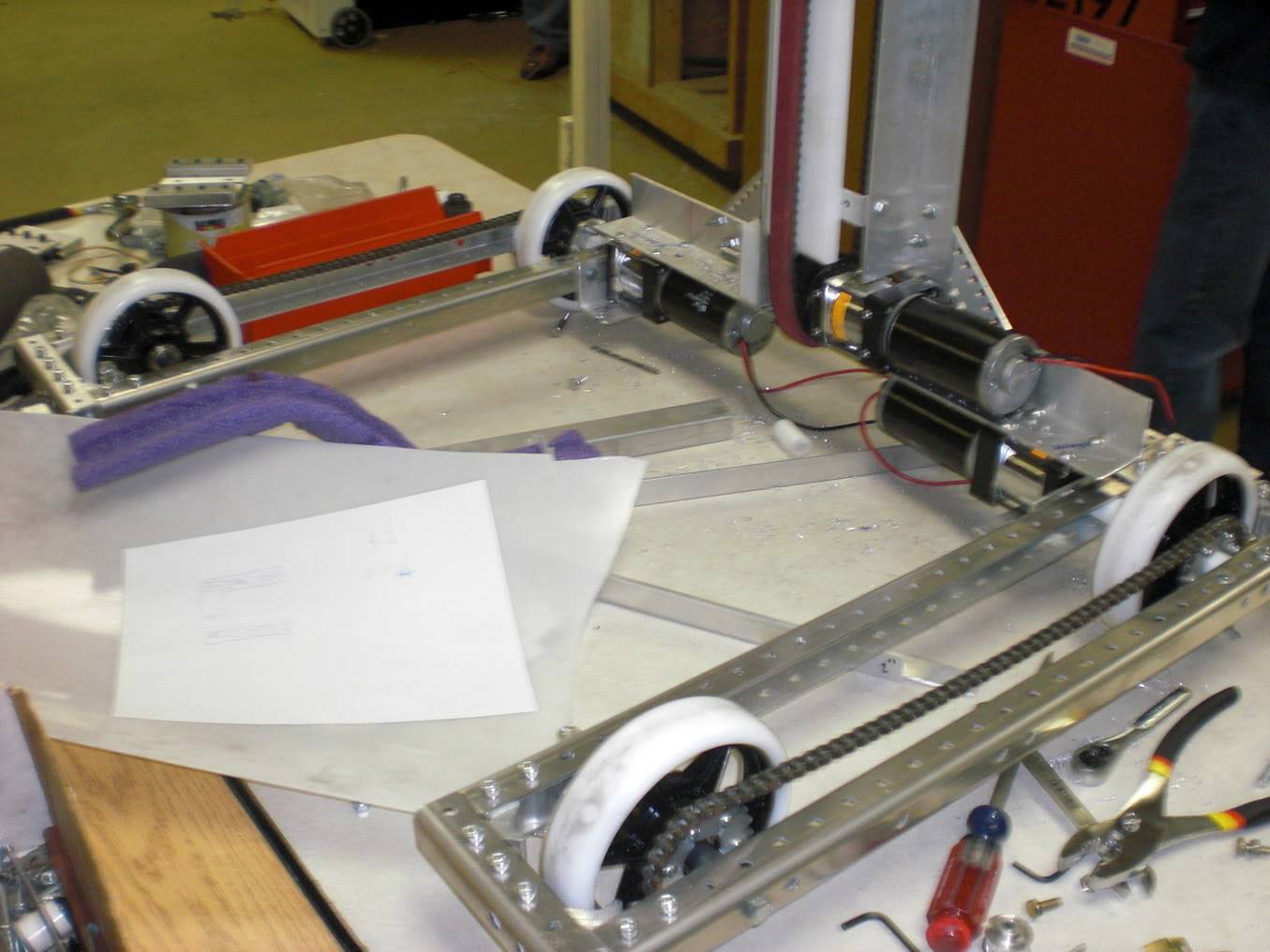
About five weeks later we had it built, programmed, crated and shipped to Ohio for our first reginal where we placed 6th place out of 59 teams.
I could write an entire book on the many long nights we spent building this, and all the different ideas that came to mind in the process but to spare the life of my keyboard and your focus I will leave it at this for now. As anyone who has ever built a robot before knows, I love to be asked questions about my creation so please feel free to ask them. Like I said I know I left out a lot of details but I can’t possibly answer every question someone might have, so please just ask in a kind manner and I will be glad to answer anything for you. I had a ton of photos on fliker but apparently my account got switched or something and I lost them all, ill figure something out soon. If your dispirit to see more, again just ask and ill e-mail some to you.
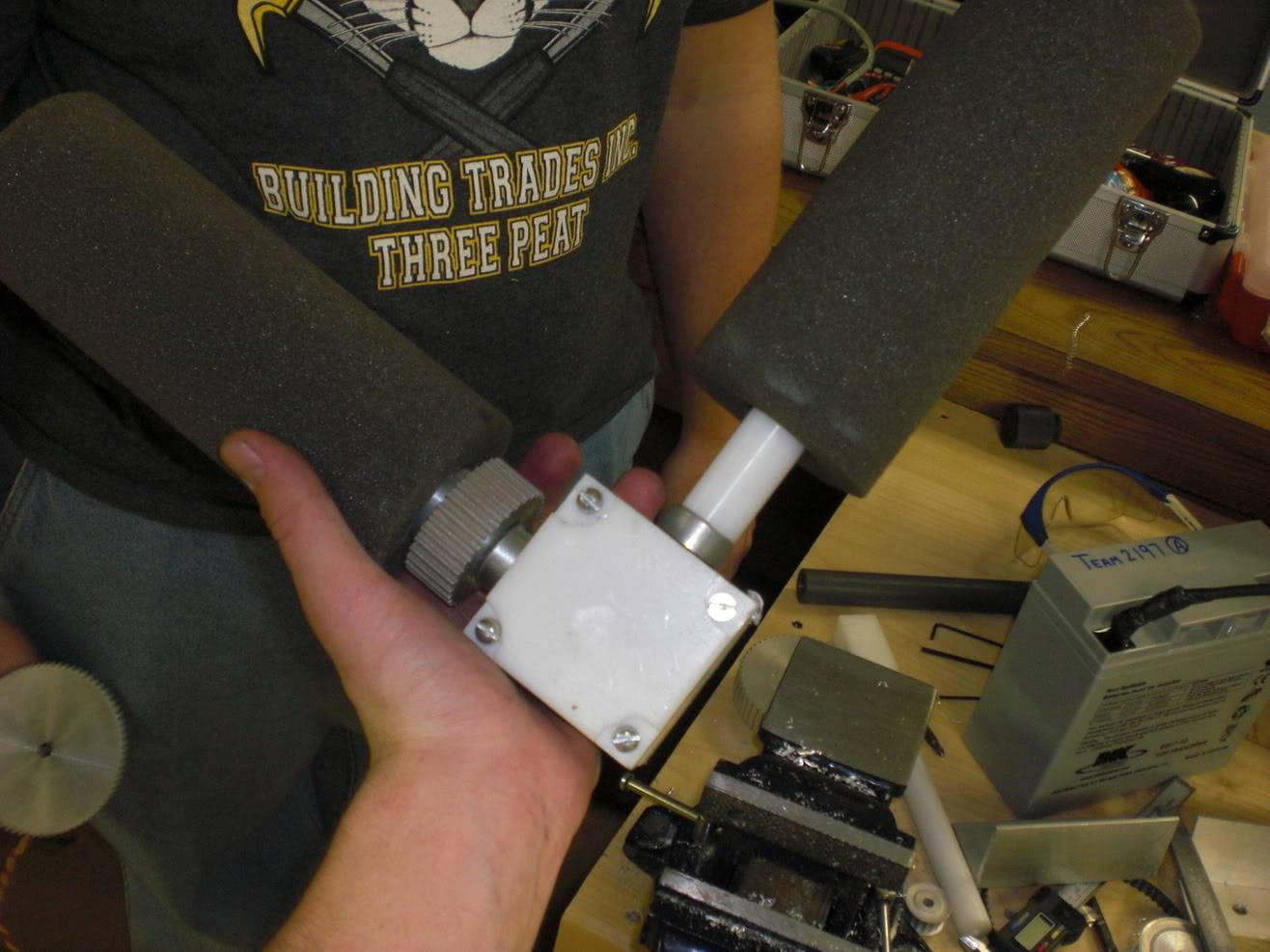
Instead of using a bunch of pulleys and stuff I had the brilliant idea of just putting the intake rollers at a 90^deg angle and linking them with a gear bot. Only problem is we didn’t have a gearbox like that… But a company who gave us a lot of materials (E-Pak Machinery) had two bevel gears laying around and some thick plastic that machines like a god. Lo and behold this is what we ended up with. Though there isn’t that gear on the shaft anymore, it was replaced with a single motor direct drive much more eficent. I don’t know if I have a picture of that… Had so much fun making this!!!
Built this for the 2009 FIRST Robotics Competition "Lunacy"
Actuators / output devices: We used two SIMs in conjunction with planetary gear boxes for something like 1:24 direct drive. And a few other motors just ask if you want to know!
Control method: Autonomous for the first 15 seconds of a two minute match. Communication is 802.11n, and USB joystick.
CPU: freescale MPC5200 inside the Compact Rio, 32bit from National Instruments. I think its practically a full blown PLC.
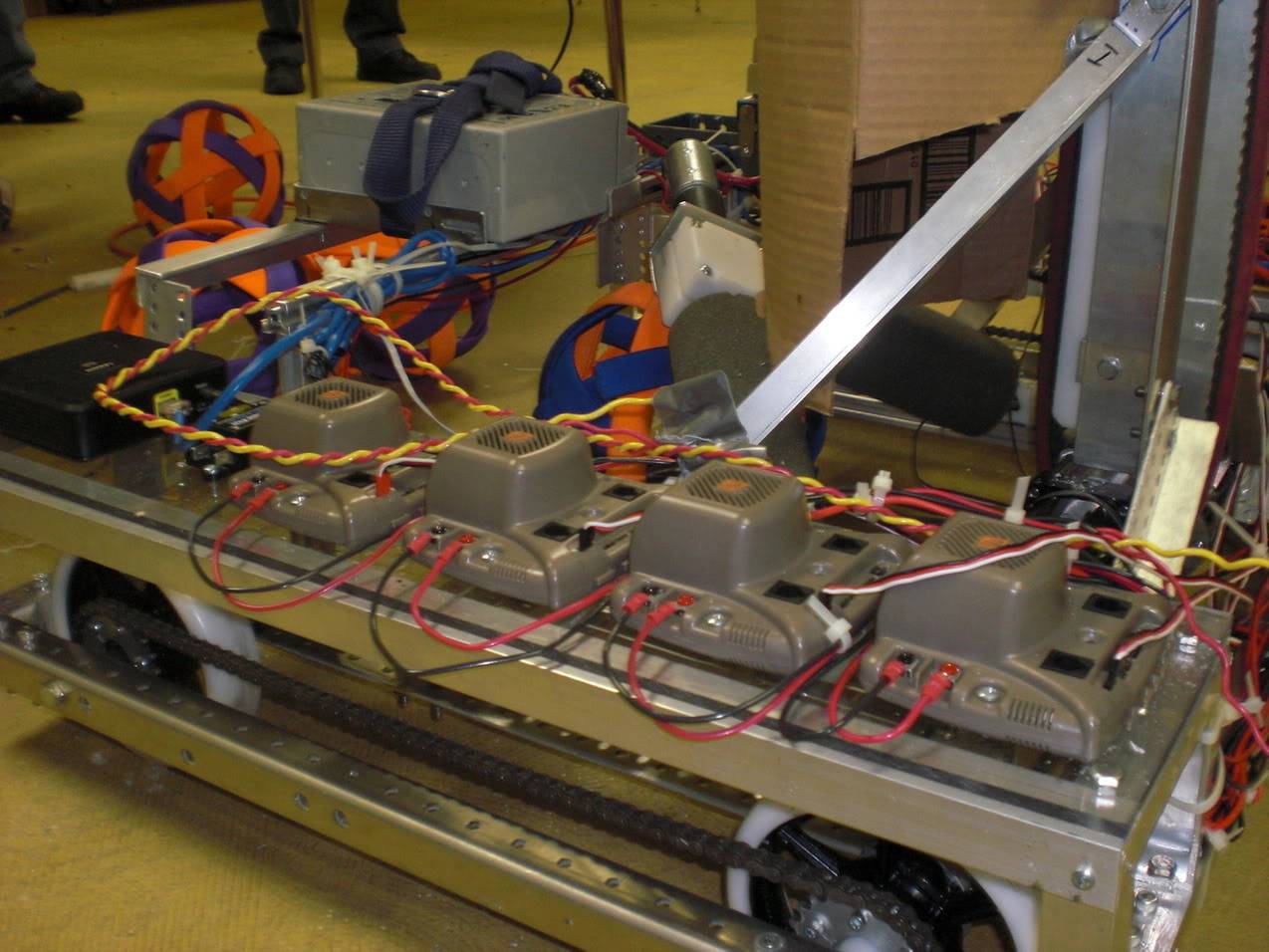
Power source: 12v 16 amp/ hour
Programming language: LabVIEW
Sensors / input devices: There is a network camera for target (trailer) tracking.
Target environment: Played on a field with 5 other robots, the flooring was made of shower liner (the stuff commonly used in gas station bathrooms) it’s all bumpy and plastic; you know what I’m talking about.
you should have seen my you should have seen my schools robot, to say it had stability problems is an understatement! you looked pretty prepared, good job!
What do you mean by stability problems? Was it the smooth playing surface that gave you simulated 1 /6th gravity, bad motors/ steering mechanisms, or was it simply too top heavy? I guess you could say we were prepared! Though we never thought in a million years that we could get 6th place so that’s always a plus. Also I was determined to build something that actually worked this year, last year the senior who was ”in charge” had a lot of good ideas but they were fairly complicated, and that robot was somewhat worthless on the field. I decided something simple would be our best bet, we scavenged used parts from a local “filling machine company” they build assembly lines that fill bottles like Chapstick, candles, water, bandages, that type of stuff. So they had lots of belts and pulleys, plastic, bolts, plexi glass. Just all sorts of things. How did your team do by the way? And where did you compete this year?
Nice Nice project and congrats on placing. Those CRio’s are awesome, I use them with the 9234 modules for vibration monitoring DAQ systems. Cool idea using one to control a robot. What modules did you use?
Cool NI makes some class equipment. I’ve been using their stuff for years. LabView programming is a nice skill to pick up. Are you in an engineering program?
They sure do, and Lab View looks amazing, though most my time was spent on the robot so unfortunately I couldn’t dive into that as much as I had hoped. And yes currently I’m enrolled as an ECET student at Purdue North Central, start classes next spring. But I’m trying to switch my major to Advanced Manufacturing (basically industrial robotics and automation) because I have been getting into that stuff a lot lately. Either way I’ll be happy because I love doing both. May have to skip Purdue and got to Ivy Tech though because local Purdue doesn’t offer it as of now.
Reminds me I have a UMI RTX robotic arm, ever heard of them? Anyway I didn’t build it but I can program it to do stuff and it’s amazing, maybe ill post that.
Like I said we did really well in Ohio 6th place out of 59, but at the Purdue regional we had probables. Problems that were really just out of our hands like speed controllers dyeing, losing communication, main breaker broke once, and also front intake roller fell off at the beginning of a match all and all we placed 27th out of 35 teams there. Which isn’t great at all but it was still a lot of fun; I mean we were at Purdue! During their spring break, so me and a friend just walked all around searching random building for cool stuff and people. Ran into a guy that was building what he practically described as a UAV that was sweet and got a tour of the industrial robotics lab so yeah it was fun! Wish we were in Atlanta with you though didn’t know that was this week?
sweet. my team got into semifinals. our alliances were pretty bad actually most of the way, but our alliances that chose us were awesome. Our robot was like 2nd, but the alliance as a whole only made it to semis. our controls went out too. and so did the dumper. and the battery. ugh.
but we won EI, so we qualified. Only part of our team is at atlanta ($$$ problems), but the rest like me can watch it live on the FRC site. neat stuff.
well, good luck next season. you guys did real good placing 6. hope to see you at atlanta next year!
Sounds like you’re team is doing awesome!!! Good luck man. And yeah I know what you mean; if our team made it we would only be able to afford to send the key members. I am a senior so ill be graduating this year, but maybe you will still see team 2197 Las Pumas there. I actually hope to start my own team soon; I think I could be a good leader and mentor. 2012 is when I hope to have it formed or at least organized.
2866 project mayhem and yep, i was the driver throughout the competition.
The kid Nate from Johnson and Johnson, he is a soph in college is an awesome person, he got our bot running.
The captain on our team knows nothing about robots, which is whyu it looked like what it did, and i dont go to the school so i couldnt do anything about that, but thanks to your whole team mate!