

Capteur de Distance Laser LIDAR-Lite - Croquis Arduino d'Un «Radar»


*note*: pour discuter de tout problème technique avec votre LIDAR-Lite, passez à notre forum et créez un nouveau sujet ici.
 Exemple de Robot sur deux roues
Exemple de Robot sur deux roues
 Capteur de distance Laser LIDAR-Lite [RB-Pli-01]
Capteur de distance Laser LIDAR-Lite [RB-Pli-01]
 LIDAR-Lite monté sur servomoteur
LIDAR-Lite monté sur servomoteur
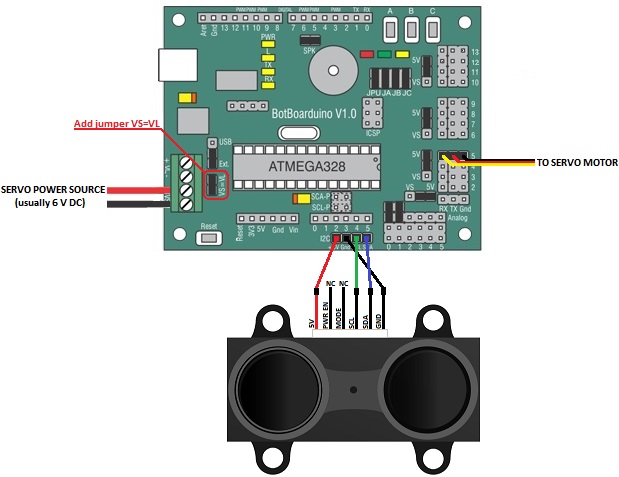 Schéma de câblage avec une source unique d'alimentation
Schéma de câblage avec une source unique d'alimentation
 Émission type sur un écran série Arduino
Nous sommes impatients de voir ce que vous allez faire avec votre LIDAR-Lit!
Émission type sur un écran série Arduino
Nous sommes impatients de voir ce que vous allez faire avec votre LIDAR-Lit!
Exemple de Robot sur deux rouesTélémétrie
Déterminer la distance d'un objet face à votre robot est une tâche assez simple et s'effectue de manière fiable depuis bien longtemps à l'aide d'un sonar et de capteurs de distance IR. Dans la plupart des cas, ces deux types de capteurs répondent aux besoins de base du robot lorsqu'il s'agit d'une mesure de distance. Un sonar peut fournir une bonne portée sur la plupart des surfaces, mais il dispose de larges faisceaux de détection qui peuvent facilement être perturbés. D'un autre côté, les capteurs de distance IR fournissent un faisceau resserré très étroit mais qui souffre des différences de réflexion sur des surfaces différentes, modifiant ainsi les lectures de distance. Jusqu'à récemment, il n'existait aucune bonne option pour les projets dotés d'un budget d'amateur et qui nécessitaient un petit faisceau de détection à longue portée, et à haute précision, pour la mesure de distances.Capteur de distance Laser LIDAR-Lite [RB-Pli-01]Capteur de Distance Laser LIDAR-Lite
Nous aimerions vous présenter le Capteur de Distance Laser LIDAR-Lite [RB-Pli-01] de PulsedLight. Ce télémètre laser compact et abordable dispose de tout ce dont les amateurs de robotique pourraient avoir besoin en télémétrie ! Il dispose d'une télémétrie laser pour des distances jusqu'à 40 m (~ 131 pieds) avec une précision de ± 2,5 cm (~ 1 pouce) et d'un temps d'acquisition de moins de 20 ms. Tout cela est offert dans un module qui pèse 16 g (~ 0,56 once) et consomme moins de 100 mA à 5 VCC (moins de 2 mA au ralenti). L'appareil utilise une interface I2C simple pour communiquer les distances mesurées. LIDAR-Lite monté sur servomoteur
LIDAR-Lite monté sur servomoteurExemple Arduino
Pour démontrer à quel point cet appareil est facile à utiliser, nous proposons ici un exemple simple d'un « radar » à 180 degrés utilisant le LIDAR-Lite, un petit servomoteur et quelques supports de montage.BoM (nomenclature des matériels)
Voici la liste des pièces qui ont été utilisées pour réaliser cet exemple :- BotBoarduino de Lynxmotion
- Capteur de Distance Laser LIDAR-Lite
- Servomoteur HS-645MG* (alternative : Servomoteur HS-422)
- Support** pour maintenir le LIDAR ou celui-ci pour faciliter le placement
- Support pour maintenir le servomoteur
Configuration
Ci-dessous, vous pouvez trouver le schéma de câblage pour relier le BotBoarduino Lynxmotion au servomoteur et au LIDAR-Lite en utilisant une source d'alimentation commune pour la logique et le servomoteur. Consultez ici un schéma de câblage utilisant deux sources d'alimentation pour le BotBoarduino Lynxmotion.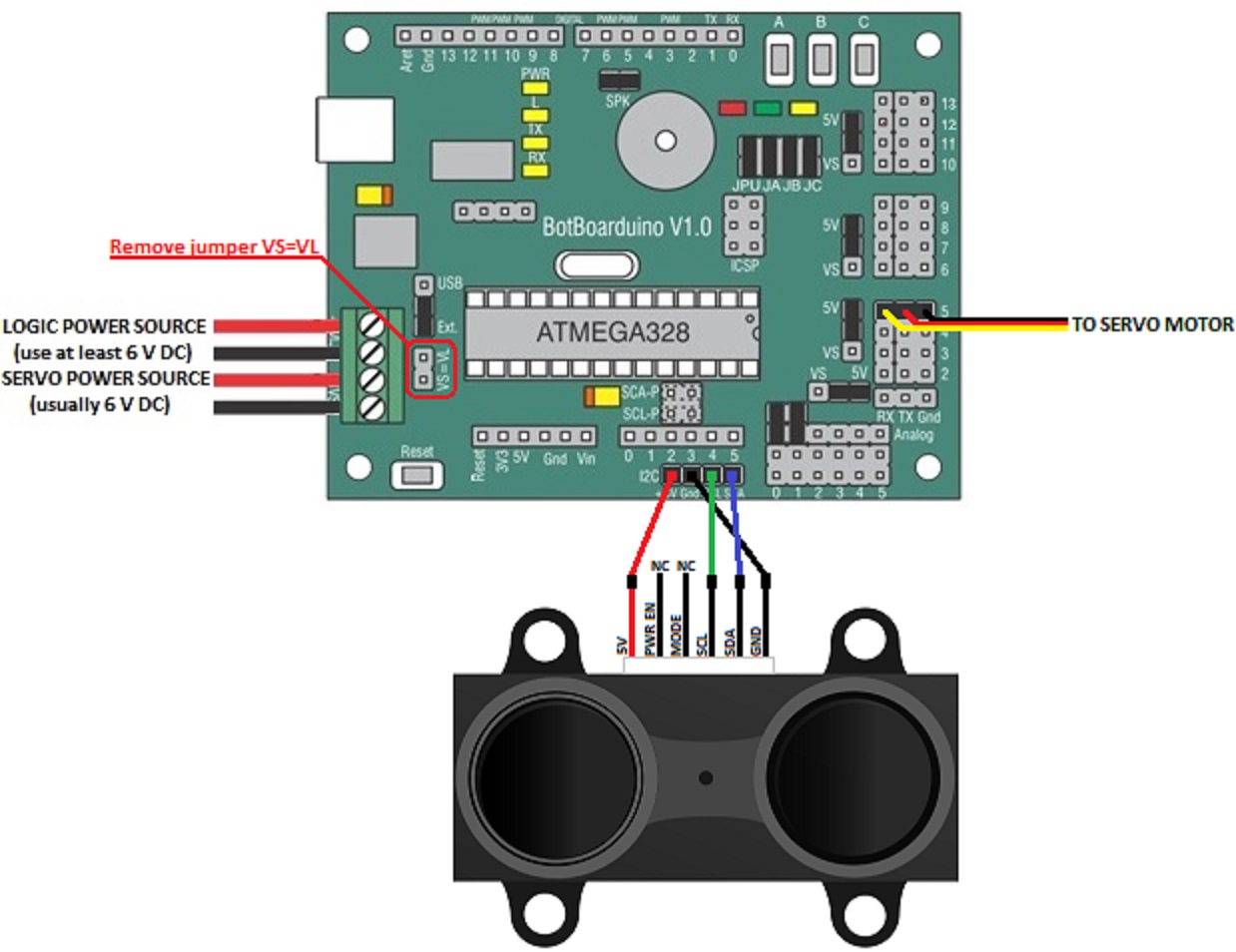{kind=link}
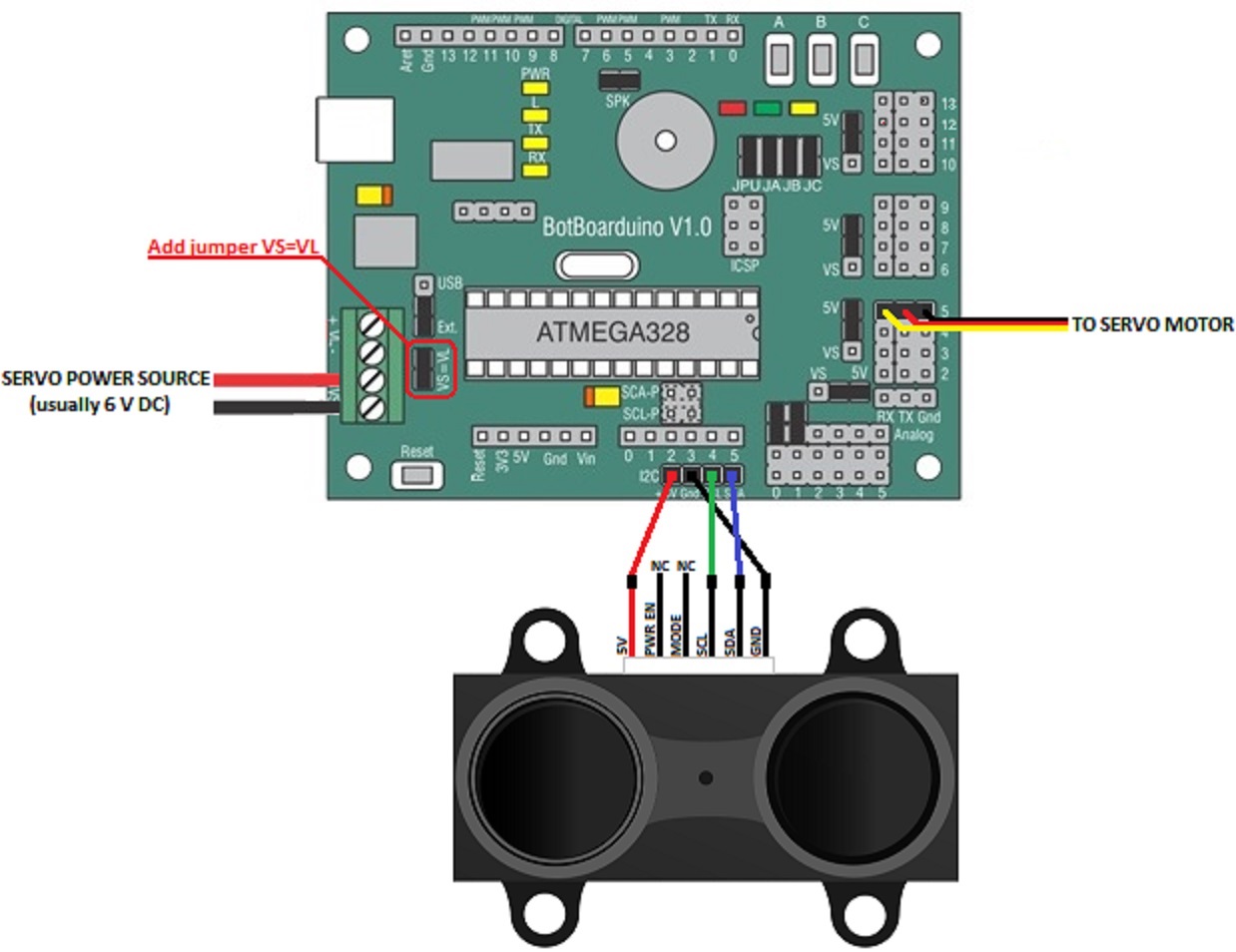 Schéma de câblage avec une source unique d'alimentation
Schéma de câblage avec une source unique d'alimentationExemple de code
Vous pouvez trouver le code source ici.Sortie
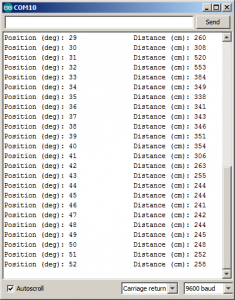
L'émission du code d'exemple se fait dans un format simple d'une ligne par lecture de mesure, en indiquant l'angle et la distance de chaque lecture. Cette émission est destinée à être lue par un humain. S'il existe un interfaçage avec un autre microcontrôleur ou un ordinateur, il est recommandé d'avoir un format plus compact (probablement binaire) en sortie avec une correction d'erreur afin de s'assurer de la validité des données. Voici un exemple d'émission du code d'exemple. Émission type sur un écran série Arduino
Émission type sur un écran série ArduinoThanks for helping to keep our community civil!
Notify staff privately
You flagged this as spam. Undo flag.Flag Post
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
✅ Your Post Has Been Submitted Successfully!
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!