

Simple People Counter Using Radar

OmniPreSense has released a new update to its API which now allows you to count how many objects have passed a fixed space in front of the sensor. The radar detects objects either based on speed (OPS241-A, OPS242-A, OPS243-A) or range (OPS241-B). Using filter settings, a detection region can be defined with minimum and maximum speeds or ranges.
For example, maybe you want to count cars on a street but not any of the people that walk by. Setting the filters to ignore all speeds below 3 m/s, which covers the walking speed of people, would allow the radar sensor to only "see" the vehicles which typically move at greater than 3 m/s.
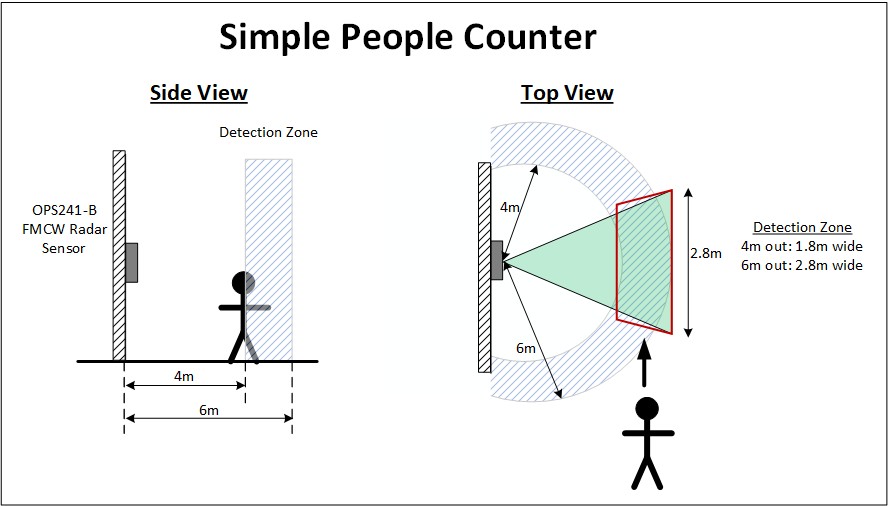
Another variation is using the OPS241-B and filtering on range. The radar sensor reports the range to objects detected but it is in spherical coordinates out from the sensor. Using an EM lens like the OPS241-A-CW-L26 from OmniPreSense, the beam width or field of view is limited to 26 degrees. Taking this field of view and applying a range filter of say 4m minimum and 6m maximum provides a trapezoidal detection zone. Any people that walk through this detection zone are counted. Issuing a simple "N?" command to the sensor will report the count meeting the filter settings since the counter was turned on ("IG" command).
Of course it does not have to count just people but could count robots, vehicles, or pets. Additional filtering on signal magnitude allows the sensor to further refine what it counts and what it does not count.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!