Boys and Girls: I have completed assembly of the legs on my Lynxmotion 3DOF T-Hex, and mounted them on the chassis. There is some possibility that I have done this correctly.
I have previously verified all my electronics (PS2 ==> XCVR ==> BotBoarduino ==> SSC-32U ==> servos, using Bill Porter’s PS2 library and an example code, and that whole chain appears to be working.
I am now at the step in the “Complete 3DOF T-Hex Tutorial” where it talks about using LynxTerm to “tweak” the servo “offsets.” I note that LynxTerm and Hexapod Calibration are available for download, but “no longer supported.” I do have the apparently newer SSC-32 Servo Sequencer, and I note that this program has a “Calibrate” mode.
So my main question is: Which of these programs should I use to make the final servo adjustments? Also, it is my understanding that the offsets from LynxTerm will actually be stored in the SSC-32U. Is that correct? And finally, are the adjustments made in the Calibrate Mode of the SSC Servo Sequencer also stored in the SSC-32?
Those tutorials are quite old. Most of the info still applies except for a few things, most of them software related… The Hexapod Calibration software will probably not work well with that setup. I recommend you use Lynxterm. It is still the best option for configuring advanced settings on the SSC-32/SSC-32U.
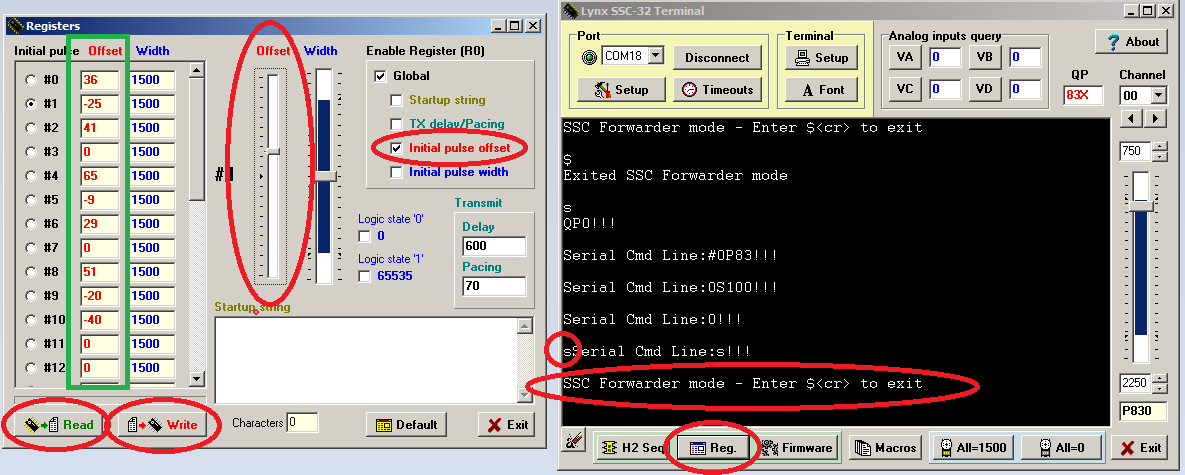
Here’s a image showing how calibration works in Lynxterm with the hexapod code using the passthrough mode.
Yes, that is the case.
No, the SSC Servo Sequencer stores offsets in a local configuration file.
Therefore, I strongly recommend using Lynxterm so the offsets will be available to the hexapod code you’ll be using on the BotBoarduino.
Looking forward to it. Do you intend on making a robot page for it?
Well, it does have some differences. Mainly it has slightly different timings for the polling of signals for use with older Lynxmotion PS2 controllers. If the library you are currently using works for your controller don’t change it!
If I remember correctly it also has a working example for the Arduino Mega.
Sounds like a good approach! Much safe than trying it right away on an assembled robot and ending up with a broken pretzel releasing magic smoke!
“broken pretzel releasing magic [blue] smoke” - yes, I hate it when that happens!
You state that “IIRC it also has a working example for the Arduino Mega” (which I am planning to use eventually). I don’t understand what “IIRC” stands for.



 The Hexapod Calibration software will probably not work well with that setup. I recommend you use Lynxterm. It is still the best option for configuring advanced settings on the SSC-32/SSC-32U.
The Hexapod Calibration software will probably not work well with that setup. I recommend you use Lynxterm. It is still the best option for configuring advanced settings on the SSC-32/SSC-32U.