Update: uCee is now fully running MicroPython on a custom ARM board I designed and made.
Update: So I've printed the lid, and it looks much nicer now.
Update: I've got a bunch more done now, since my Teensy 3.1 carrier PCB finally showed up. I've done up a test fitting of everything, and it all seems to fit pretty well:
You can read a bunch more details on my blog post: http://blog.huv.com/2014/01/ucee-coming-together.html
uCee (MicroCrawler) is a small tracked robot I designed and built to play around with more advanced micro-controllers.
Right now it has a Teensy 3.1, but sometime later this spring I will be replacing that with a MicroPython board. It has 3 range-finder sensors, which are paired Sharp GP2Y0A41SK0F analog range sensors along with a ProxDot, which removes the strange close-range behavior of the Sharp analog sensors. It has optical encoders on each gearmotor (100:1 gear ratio), and full PWM control of the motors. I've also got closed loop PID control working on the Teensy. It has a 9-axis IMU from Pololu, and a BlueSMiRF bluetooth serial module.
The chassis and wheels were 3D printed on a Mojo 3D printer. The tracks are from a Lego Technic set. The robot is 102mm long, 91mm wide, and 50mm high (that's 4" long x 3.6" wide by 2" high, for non-metric people).
I'm planning on building an Android application on my phone to show sensor feedback, and allow simple interactions like choosing a "mission" to run.
The code and design files for uCee are all on my Github account, including the CAD model and STL files. You can read more (and see more pictures) on my blog (http://blog.huv.com).
Navigate Autonomously
- Actuators / output devices: 100:1 Gearmotors, Optical Encoders on motors
- CPU: ARM STM32F405
- Operating system: MicroPython
- Power source: 2 x 3.7 volt 250 mAh Lipo batteries
- Programming language: Python
- Sensors / input devices: Sharp IR Range-Finders, 9-Axis IMU, Optical Encoders
- Target environment: indoor, light outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/ucee-microcrawler
I have your app.
Hey dude,
I wrote an android app that I think would work perfectly for you. Its available on the play store (or whatever Google is calling it now) titled “RocketBot”, but if you want to save the two bucks, just send me a quick email and I would be happy to send you a copy, no worries.
[email protected]
RocketBot looks pretty cool,
RocketBot looks pretty cool, but it seems to have more focus on controlling the robot, and I’m not really interested in that. I mocked up a UI for half the screen a few weeks ago in Python:
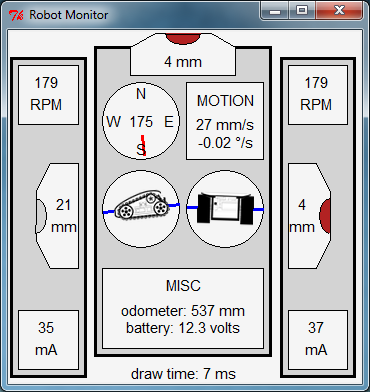
The bottom half of the screen will display different things, depending on which mode you're in.
Jon! How are you? I’m glad
Jon! How are you? I’m glad you found us! I’m Gabriel, from Toronto (actually now I’m in Mississauga)! Did Steve tell you I keep bees on his property? Let me know when you’re coming to GTA, I have a jar of honey for you!
I know you have extra cool robots, I’m so happy you decided to share them with us. Keep them coming!
Cheers!
What a surprise -?!
I’ve been tracking your work for years. Although your site appeared to be dormant it was always a pleasure to visit and marvel at your creations. Its a small wonder that you should turn up here? Whatever became of the NanoSeeker project? For those that don’t know its essentially a test tube AUV.
Hi Gabriel,We should get
Hi Gabriel,
We should get together sometime and talk robots. I haven’t talked to Steve in ages. I wish we still did build-fests - I kinda miss the old crowd.
Sure, I’d like to meet.
Sure, I’d like to meet. Let’s find a long weekend or so and do it. I also miss the bild fests and also the CNRG. You should give Steve a call, he has a newborn son he’ll love to brag about. Perhaps we can all meet somewhere…
Machina,Thanks - NanoSeeker
Machina,
Thanks - NanoSeeker is in a box right now, although I’ll be at least partially resurrecting it this spring - I’m going to JSConf, and one of the activities there is Node-Boats. Since NanoSeeker has an ATmega328, and a bluetooth serial module, it will make a fine NodeBoat.
![|x]()
NanoSeeker is 1.25" in diameter, and 6" long. Most of the parts were 3D printed on a Dimension uPrint. It has an ATmega328, a bluetooth module, a 3-axis compass with integrated 3-axis tilt chip, custom hand-made linear actuators with gearmotor pager motors and hall-effect sensor position feedback. It also has provisions for an SPI pressure sensor, although I haven't integrated that yet.
Very nice robot.And now
Very nice robot.
And now you’re guilty… I added “build a tracked robot” on my too long todo list 
The tip to use Lego Technis tracks with printed wheels is very useful, I didn’t thought about it, thanks.
Nice one. I didn’t realize
Nice one. I didn’t realize it was so small until i played the video. Great looks.
I look at this little guy
I look at this little guy and think yes, this is why I ordered a 3D printer. Love the design.



