


uCee (MicroCrawler)
Update: uCee is now fully running MicroPython on a custom ARM board I designed and made.
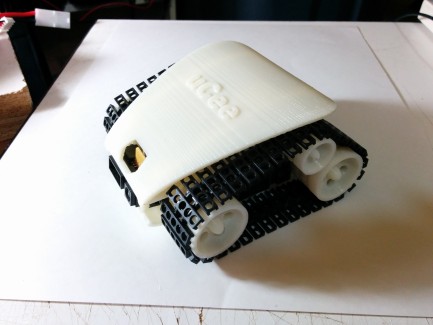
Update: So I've printed the lid, and it looks much nicer now.
Update: I've got a bunch more done now, since my Teensy 3.1 carrier PCB finally showed up. I've done up a test fitting of everything, and it all seems to fit pretty well:
You can read a bunch more details on my blog post: http://blog.huv.com/2014/01/ucee-coming-together.html
uCee (MicroCrawler) is a small tracked robot I designed and built to play around with more advanced micro-controllers.
Right now it has a Teensy 3.1, but sometime later this spring I will be replacing that with a MicroPython board. It has 3 range-finder sensors, which are paired Sharp GP2Y0A41SK0F analog range sensors along with a ProxDot, which removes the strange close-range behavior of the Sharp analog sensors. It has optical encoders on each gearmotor (100:1 gear ratio), and full PWM control of the motors. I've also got closed loop PID control working on the Teensy. It has a 9-axis IMU from Pololu, and a BlueSMiRF bluetooth serial module.
The chassis and wheels were 3D printed on a Mojo 3D printer. The tracks are from a Lego Technic set. The robot is 102mm long, 91mm wide, and 50mm high (that's 4" long x 3.6" wide by 2" high, for non-metric people).
I'm planning on building an Android application on my phone to show sensor feedback, and allow simple interactions like choosing a "mission" to run.
The code and design files for uCee are all on my Github account, including the CAD model and STL files. You can read more (and see more pictures) on my blog (http://blog.huv.com).
Navigate Autonomously
- Actuators / output devices: 100:1 Gearmotors, Optical Encoders on motors
- CPU: ARM STM32F405
- Operating system: MicroPython
- Power source: 2 x 3.7 volt 250 mAh Lipo batteries
- Programming language: Python
- Sensors / input devices: Sharp IR Range-Finders, 9-Axis IMU, Optical Encoders
- Target environment: indoor, light outdoor