I have been watching all of your project posts for some time now and found them most interesting. This TriCopter/QuadCopter has especially caught my fancy. My 12 year old grandson and I were very impressed by your videos. Your skills at designing and building seem to be matched well by your skill at flying. (I assume you have several years experience flying R/C aircraft.)
That leads me to some questions: Do the sensors and software you installed provide enough flight stability to allow you to concentrate on pilotage - speed, direction, altitude, manuver? Or do you feel that you are expending great effort constantly correcting for stability in addition to piloting the bird? In other words, if you center the sticks and release the controls, would it achieve a stabile, hands-free hover?
Sorry I have not commented sooner; my railroad consumes all my summer time. I have no words of advice because you are way ahead of me. So I offer encouragement.
I don’t have that much talent…
Tanks a lot for all thoses good words…!
My flying skills are not realy good… but t can fly.
The QuadCopter fly much like a standard Helicopter but the “Nunchuck” accelerometer keep it lever and there is more stabilisation comming.
I have a Magnetometer on order.
It’s not hands free right now.
Controller do the mixing for the 4 motors.
Once trimed it’s good…
Withc Heli you have ?
I have some Helicopter. But since i have try Quadcopter i didn’t even look at them… lol
I have my T-Rex 500 and have a bunch of updated parts that i need to install on it. didn’t take the time in the whole year…
The “Auto-Level” feature of the MultiWii it a ++
Can’t wait to try tha on the BotBorduino…
Your videos really excited me for two reasons: I love your QuadCopter, and if UPS is right, my GoPro camera arrives tomorrow.
Your #2 video showed more of the QuadCopter structure which I found interesting as a frame of reference. In all the videos, it was possible to see the variations in relative rotor speeds and their effects on roll, pitch, and altitude. How do you control changes in yaw with just those four fixed rotors? Understanding that has eluded me, but you are clearly able to do it.
Someday when my railroad is done and Uncle Sam declines to accept my taxes, I will have one of your Quads.
Thanks for not making me airsick like Robot Dude did.
Just finished my MultiWiicopter and I am exciteted as hell about it.
Yaw is made due use of inertia of the props, when speeding up the one side, while decreasing the other side. Taking in account, that the spin direction of each motor is the other side round to the next…
Thank you to Aileroned; I now understand the yaw control.
DiaLFonZo -Eric, my GoPro did arrive today. (I misread their website and thought they included a minimum capacity SD card, just not a large one. They include none. My error. So I am off to buy one.) In the meantime, I have some questions based on your great series of videos:
Did you use the camera housing with stock mounts on your Quad, or did you remove the housing and devise your own mounts to save weight?
Your videos showed varying amounts of the structure of your Quad. Were you moving the position of the mount, or changing the resolution which changes the angle of the field of view?
GoPro’s specifications show minimum focus as two feet/six meters. Your video showing the most structure appears to have very good focus much closer than 2 ft/6 m. Did you have to use any kind of auxilliary lens to achieve this? If so, what?
Your videos gave me great encouragement about what I may be able to achieve with my trains and my club’s displays. For me, weight will not be a factor, but sharp depth of field will be. I have done photography and videography for 47 years, but any advice you can give me about getting the maximum out of this GoPro will be highly appreciated. I am hoping to combine its video with video from another HD camcorder.
The Resolution you chose affect the viewing of the video. But i have change the mount to put a damper un front and it has change the view too.
But all that was taken at the same spot on the frame.
Didn’t use any other lens. But the lens that is on the casing is some kind of fisheye… and i think the spec are of the camera itself without the casing.
I will build a HEXcopter for FPV… i think the camera is a bit too heavy for my frame. But it does fly great … just don’t have the power i would like when the camera is on.
Actually I was excited to test my camera also. So I did so as soon as I inserted the SD card without even putting the camera back in the housing. I did two 360s indoors with artificial lights and sun from the outside. I was very pleased by the mixed lighting results even though GoPro cautions against low lighting. I also got much closer focus than I expected but did not conduct a measured test. The lens on the camera itself is a fisheye. In default mode, I got very curved straight lines near the picture edges. I will have to test this in the other modes. I think the “dome” on the housing is concentric with the camera lens and does not alter the fisheye effect.
I liked your method of damping vibration from the airframe. I think something similar will be necessary for the trains.


 That leads me to some questions: Do the sensors and software you installed provide enough flight stability to allow you to concentrate on pilotage - speed, direction, altitude, manuver? Or do you feel that you are expending great effort constantly correcting for stability in addition to piloting the bird? In other words, if you center the sticks and release the controls, would it achieve a stabile, hands-free hover?
That leads me to some questions: Do the sensors and software you installed provide enough flight stability to allow you to concentrate on pilotage - speed, direction, altitude, manuver? Or do you feel that you are expending great effort constantly correcting for stability in addition to piloting the bird? In other words, if you center the sticks and release the controls, would it achieve a stabile, hands-free hover?



 I had to rebuild it.
I had to rebuild it. 



 My error.
My error. 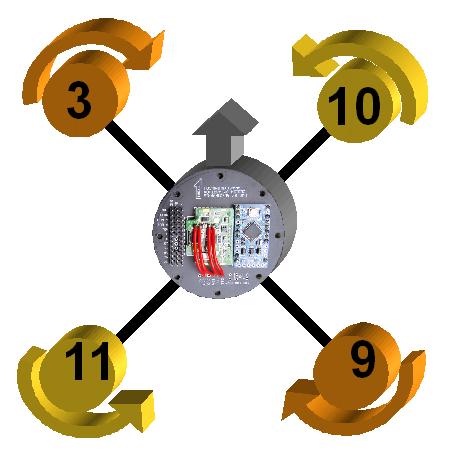
{kind=link}
{kind=link}
{kind=link}
{kind=link}