

This is TRI, my newest project. 3angle, 3 continous rotating servos, 3 normal servos, 3 Sharp IR, 3 solar cells...
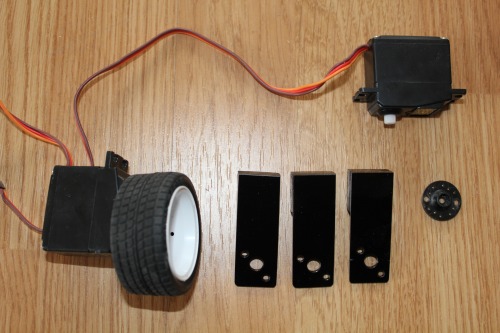
3 home made servo joints:
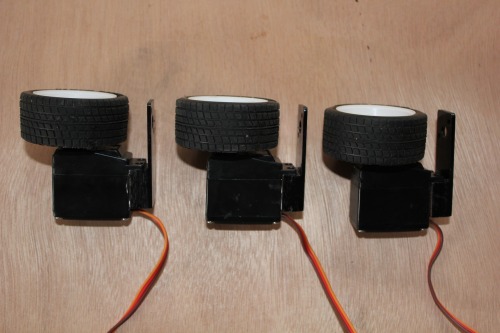
3 continous rotating servos with 3 wheels and mounted servo joints:
3angle platform under construction:

One of 3 pivotable wheels:

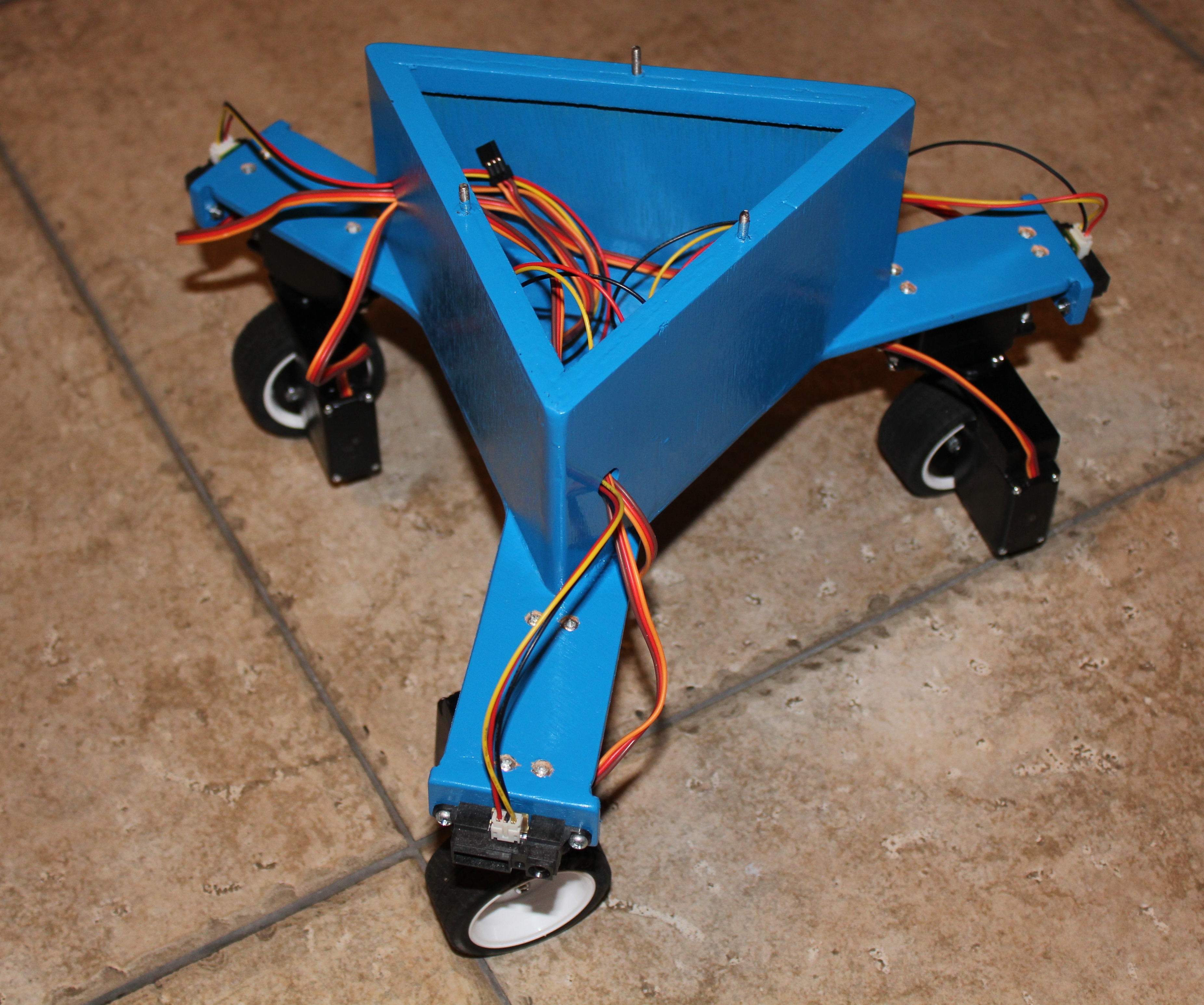
Paint job:

TRI with assambled pivotable wheels and Sharp IRs:
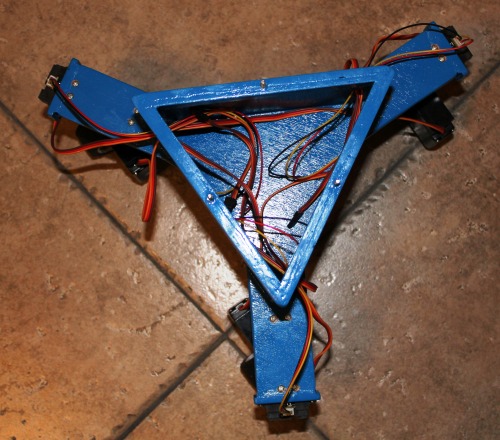
Top view:
More soon
three
- Actuators / output devices: 3 servos, 3 Continous Rotating Servos
- Control method: autonomous
- CPU: Not decided
- Power source: 11.1V Li-Po, 2200 mAh, 3 sollar cells
- Programming language: not decided
- Sensors / input devices: 3 Sharp IR
- Target environment: indoors/outdoors/small areas
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tri