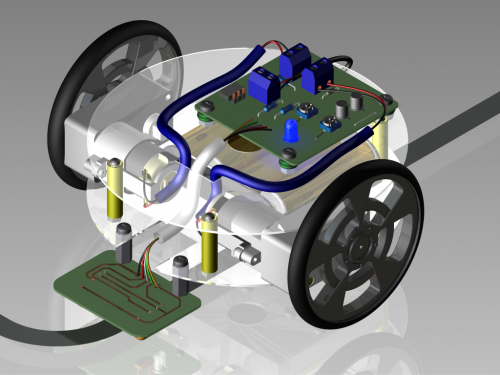
Finally today arrived the last order for this robot... the wheels and the caster....
I took me 2 night of CAD-ing...
This is my first entry and I hope that you'll like this... I made this robot based on ermicro schematic and tutorial... http://www.ermicro.com/blog/?p=1097
I used near the same things excepting the transistor... I'm using two 2N2222 transistor which allows 800mA on its collector... So the basic ideea is to follow a black line on a white surface... The principle of working is simple... I used a white LED to illuminate the surface... and one LDR as reciever/sensor.... when the white light contacts a white surface it will be reflected so the LDR lower his voltage opening the transistor... as the transistor is opening, the gearmotor gets more curent and will spin faster making it to turn...
UPDATE:
unfortunatly I get tired with setting the trimpots every time when the illuminance changed... this way I was going to use QRD1114 fairchild sensor... and finally it's working... no more white light... :D just IR...
the only problem is that when my trimpots are at 0 Ohm, my LED isn't glowing :( the blue flashing LED :(
I’m surprised no one else has commented on this! Very cool! I use microcontrollers for everything, so the concept of discrete components as logic seems quite difficult to me.
Anyways, I like it. It also looked like you spent some time on that 3D model, too.
Rubbish circuit design ! , i threw away the POTs and the diodes , put in an L293D motor driver to be able to drive the tamiya dual gearbox fitted inside my tank , functioning gr8 now .
hey yeah its cool enough this robot took 3rd place at a competition for better turns and better line sensing I would advise you to use 4 sensors instead of too
just add two new qrd… the emitter hook up as i is here… the sensor should be hooked to a two new transistors… just the two transistor from the left should be hooked like base -> emitter on from another an the right one too… I’ll do a simple schematic later…