



Transistor based line follower
Hi guys....
Finally today arrived the last order for this robot... the wheels and the caster....
I took me 2 night of CAD-ing...
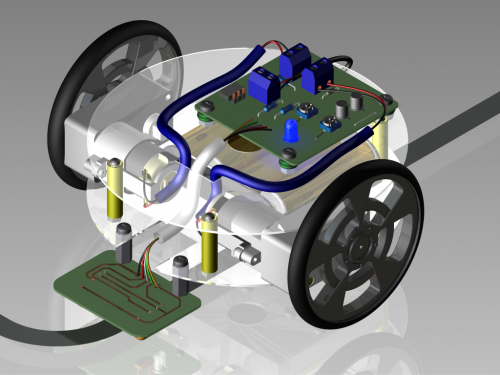
This is my first entry and I hope that you'll like this... I made this robot based on ermicro schematic and tutorial... http://www.ermicro.com/blog/?p=1097
I used near the same things excepting the transistor... I'm using two 2N2222 transistor which allows 800mA on its collector... So the basic ideea is to follow a black line on a white surface... The principle of working is simple... I used a white LED to illuminate the surface... and one LDR as reciever/sensor.... when the white light contacts a white surface it will be reflected so the LDR lower his voltage opening the transistor... as the transistor is opening, the gearmotor gets more curent and will spin faster making it to turn...
UPDATE:
unfortunatly I get tired with setting the trimpots every time when the illuminance changed... this way I was going to use QRD1114 fairchild sensor... and finally it's working... no more white light... :D just IR...
the only problem is that when my trimpots are at 0 Ohm, my LED isn't glowing :( the blue flashing LED :(
follows a black line on a white surface
- Actuators / output devices: solarbotics GM2
- Control method: Full autonomous
- CPU: 2N2222 transistor
- Operating system: batteries
- Power source: 4.5V (3AA)
- Programming language: electronics
- Sensors / input devices: QRD1114
- Target environment: indoor, near me