This is my latest tracked robot TrackFlip this little robot is excessively powerful hence the name. Full power on grass always seems to end in wheelie or a back flip / cartwheel this was an unintentional feature but rather exciting its not strictly a robot yet being still remote controled but its a start!
Im planing on getting it avioding obsticles or at the very least stoping when anything is in its way eventualy i would love it to be fully autononomous
update
just finnished a bit of a rebuild.
glued sqaure repair washers as the case had started to bend a bit
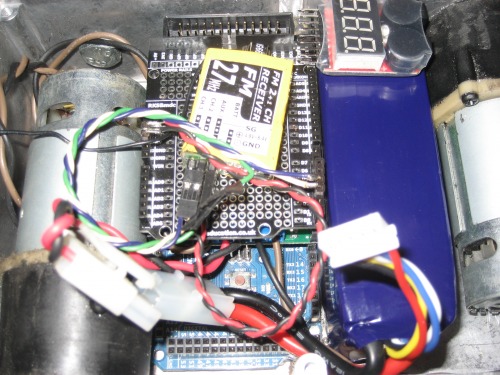
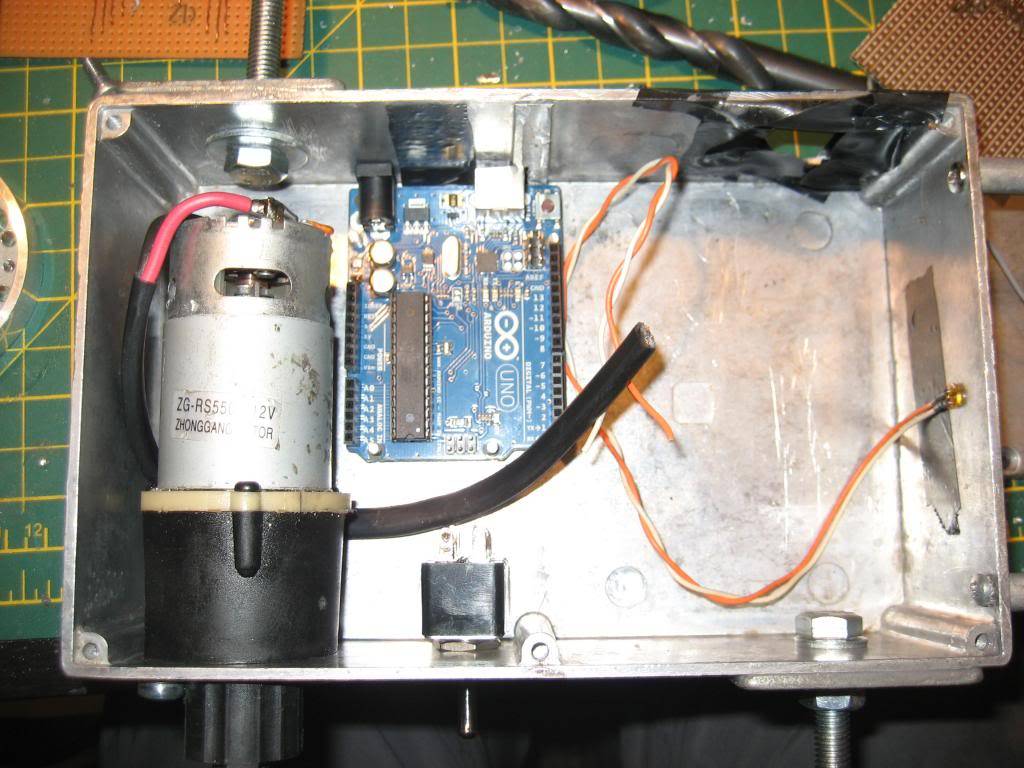
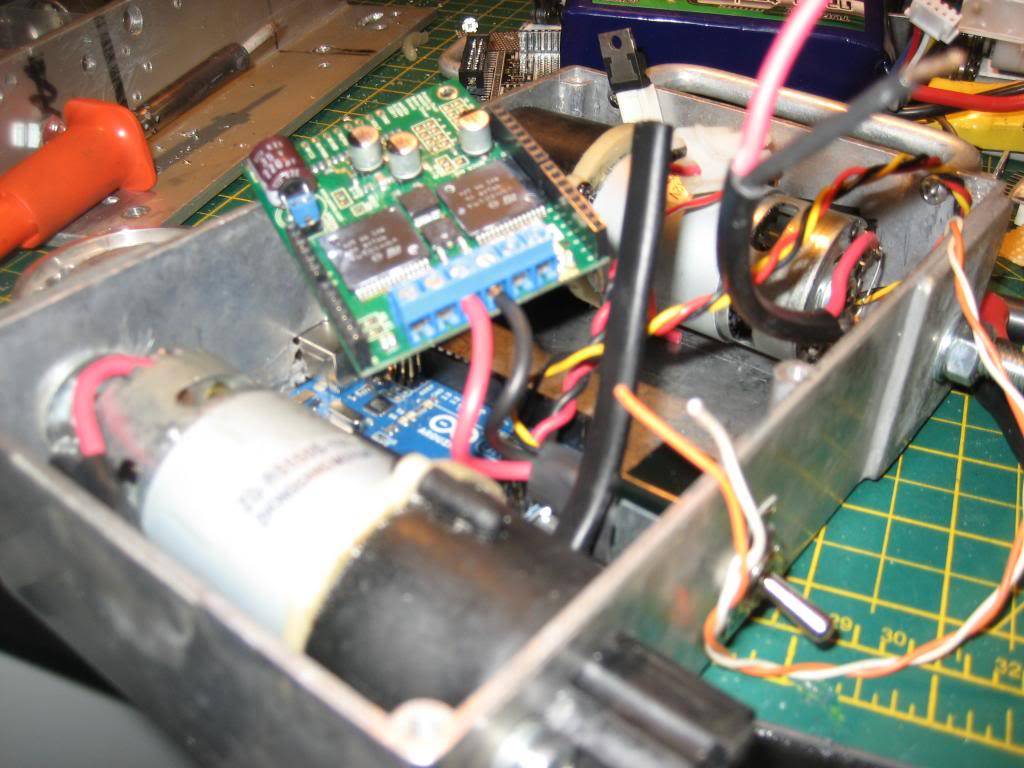
now using an arduino uno and new code now no buzzing from the motors planing on some kind of wheelie holding code with a accelorometer and tilt sensors
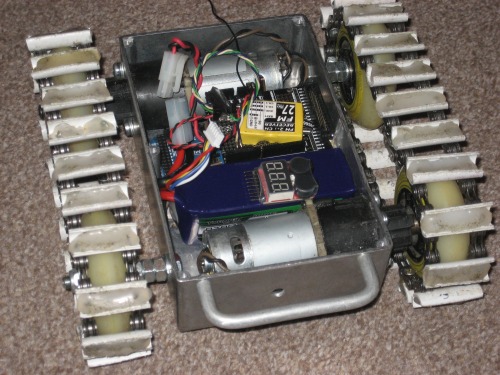
I recognize those tracks! PVC tank tracks FTW! I also see that you used some disks to mount the motors to the wheels. Could you post some more pictures of how that all works? I’m also wondering what you’re using for motor controllers with those high-powered beasts (I’m attempting to build a custom circuit that Oddbot designed in a robot that has a similar concept). Also, videos would be sweet! I’m excited to see a bot with a similar build as my own, and to armando’s.
i got inspired by armando’s instructable on building these tracks before i started building it and there definatly plenty strong enough, As for the discs in the wheels there part of the drills original twist lock chuck with the end hacksawed off and glued into the rollerblabe wheel with jb-weld, if you remove the plastic from the chuck and remove the 3 clampy teeth things that are inside and hacksaw away i would note the lock screw is reverse thread and rather soft metal i messed up one a bit
the motor controler is a pololu dual vnh5019 motor driver shield for arduino
Thanks theres still a few issues but that half the fun:-) unfortunatly my codes still a bit buggy and i lose control some times on full power and have already tore the mounting screws out of one motor crashing into a wall,but it was fixable so not all bad. Im hoping to use the 3rd channel on the rc gear as an over all speed control to slow things down as needed and looking into some sort of kill switch as well
Can you take some detail Can you take some detail photos because have made one just like that but using a Sabertooth 25x2 motor controller but i don’t know how to mount the wheels on the drill so if you can help me
Overall, good start on a mobile platform. Better yet I see you are already using an arduino shield to control the motors. That will definitely help when you decide to start making it autonomous.
i think it was the adjustment on the transmitter being a bit off theres almost no deadband before it starts moving and probably the tension on the tracks could also be a factor there not quite the same. I did some testing with both motors wired together and i drove in a fairly straight line untill it hit a bit of gravel or simmilar so im fairly sure the motors dont have advanced brushes.
to attach the motors i screwed bolts into the plastic holes making sure they were the correct length to also lock the torque limiter but this is not ideal as i tore the threads out or one motor crashing into a wall when i was only using 2 screws im looking for a way to mount them better! for the time being ive got 4 screws in each motor that ive cut down and filed to the correct length and its holding up ok so far