



TrackFlip
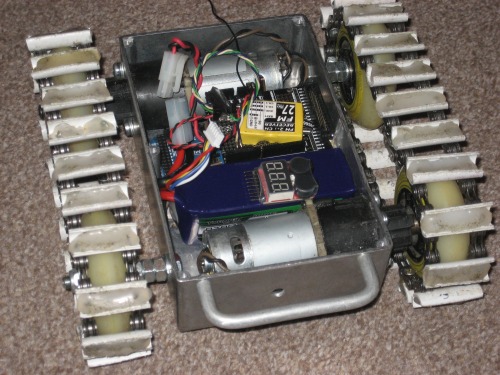
This is my latest tracked robot TrackFlip this little robot is excessively powerful hence the name. Full power on grass always seems to end in wheelie or a back flip / cartwheel this was an unintentional feature but rather exciting its not strictly a robot yet being still remote controled but its a start!


Im planing on getting it avioding obsticles or at the very least stoping when anything is in its way eventualy i would love it to be fully autononomous

update
just finnished a bit of a rebuild.
glued sqaure repair washers as the case had started to bend a bit
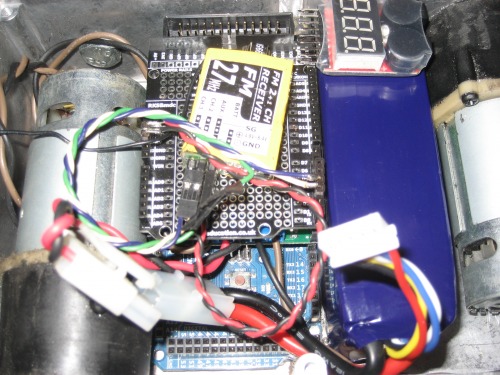
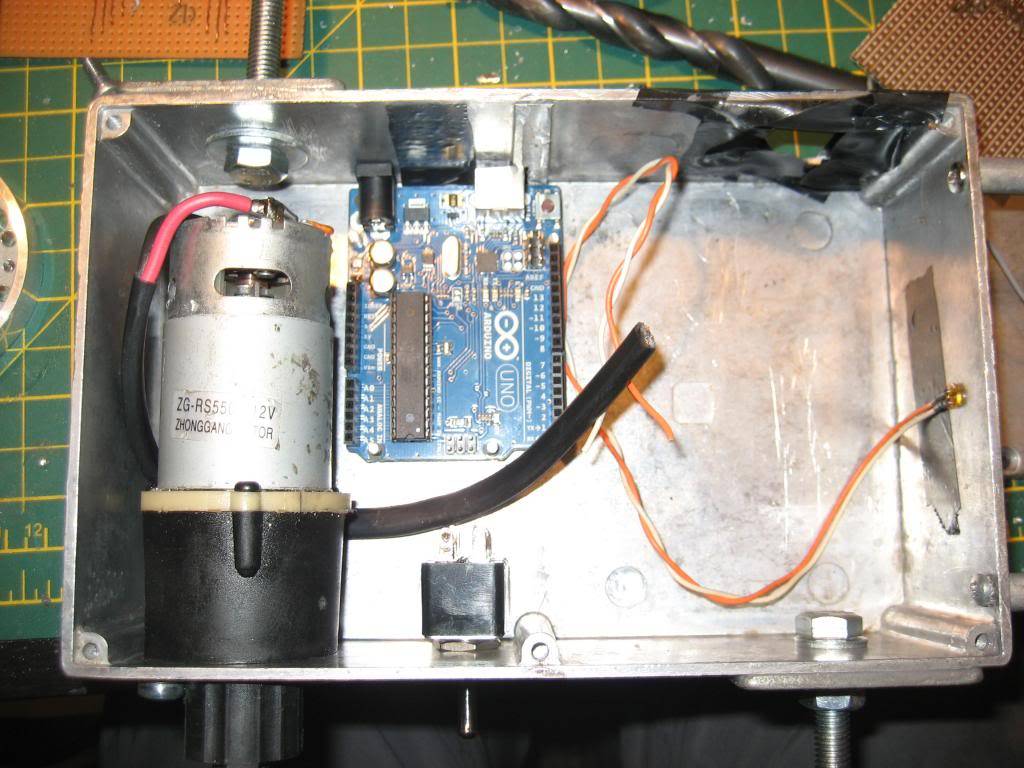
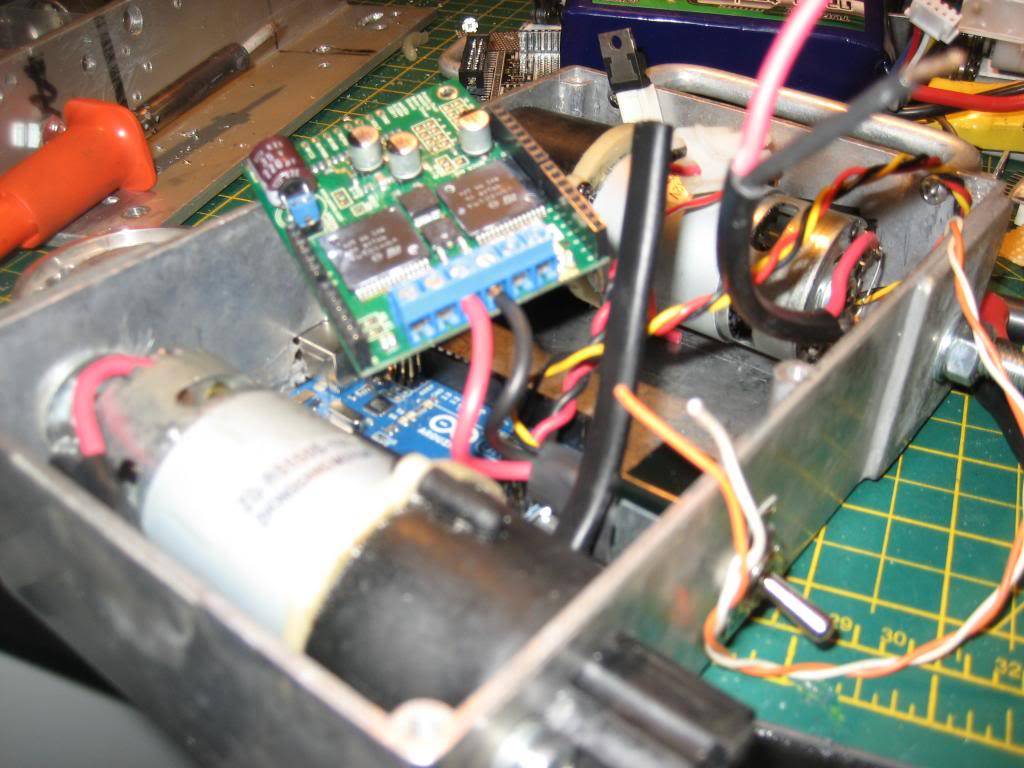
now using an arduino uno and new code now no buzzing from the motors planing on some kind of wheelie holding code with a accelorometer and tilt sensors
Picture's
pictures


Drives About at high speed knocking things over
- Actuators / output devices: B&Q budget drill motors
- Control method: RC
- CPU: Arduino Uno R3
- Operating system: undefined
- Power source: 4S 14.8V 2200mAh Turnigy Nano Tech LiPo Battery
- Programming language: Arduino
- Sensors / input devices: None yet - Sharp IR or Ultrasonic soon
- Target environment: indoor, outdoor in fairly rough terrain