Hmmmmmm. Nope still won’t
Hmmmmmm. Nope still won’t let me do either of the above.
Ok I did some experimenting with the program. Here's what I have
Here are couple pics of the torobot program…

The first pic shows the main screen broken down into three parts, upper window, lower window, control panel ( left widow).
When you hit panel a sub menu appears showing all the different channels and there serial positions. You check off which serials your not using then close the window or go ahead and arrange your serial blocks into your preferred arrangement.
The tabs at the top let you decide which robot your building. Going right is the remote button that brigs up the PS2 controller screen to choose your executable demands.
The options button brings up a window that lets you choose the language. Angle or PWD? And the maxpwm and minpwm and another box that’s not translated. Plus uninstall and restore factory settings.
Next to that is the initial values button that so far does nothing.
I pretty much know everything about the control panel but …
When you hit the add or insert button it drops off a line code in the Bottom Window showing all the #included servo servo serials. I’m pretty sure I’m supposed to add my code here but it won’t let me click the lines to add code.
Nothing happens when you hit the modify button with the servos in the bottom window or not.
There is an import and export button too that give options of the full value of the imported or into relative value on import and the options full value of export or relative value of export under the export button. Might be used to import and export code?
I just clicked on each option and each one added an open screen for Arduino and Visual studio and one marked library. So now I’m pretty much conviced these are for code insertion. But when you click on the inner buttons it erases the #included servos list in the Bottom Window.
Ok now the parts I really don’t understand the Bottom Window options.
Ok by clicking on the “O” ( as in October ). Four buttons appear.
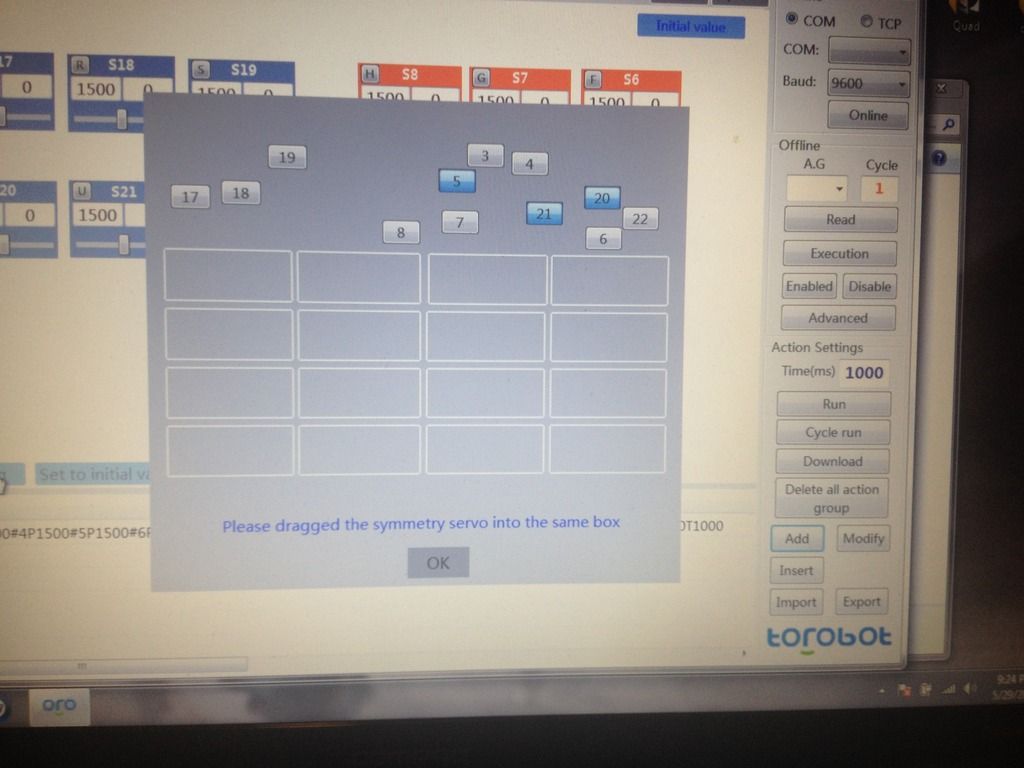
Setting button brings up the screen in pic two. And says please drag the symmetry servo into the same box. Have no idea what this means except to drag the serial blocks into the squares but I’ve tried a few different things and no go.
Next is the set to initial values button that does nothing because the symmetry is not set.
<m.left is next and also does nothing because of the symmetry
<m.all> also does nothing because of the symmetry
And m.right> which does the same as above.
Also in the instructions ( back to top pic ), it says something about using the slider function on the the main screen servo serial blocks but I have no idea why or what it does.
Thank you for your help.
Update:: the import buttons import .LIB. I tried to get it read some arduino files but it still only brings up the read me file. Should I write my code in notebook and save it, Then import it?