Ok i looked at the pics fir
Ok i looked at the pics fir the legs and all i saw was that the femurs were reversed so i flipped them. I then went ahead and tested the range on each leg. In the pic below are 1st leg-upper left----fully contracted and stopped. 2nd leg-upper right- fully detracted reverse. 3rd leg-bottom- neutral. I know its not perfect in the pic but i assure you that neutral is perfect. They do line up right.

Chassis plates came today. I
Chassis plates came today. I didnt get enough nuts for my bolts so i cant fasten it together yet. It looks a lil big still and plenty enough room to make 60* marks. Hmmmmm any way heres a pic.

I’ll look at the kinematics.
I’ll look at the kinematics. Would you mind showing me a pic of what you mean in the above post please.
Please stop using dashes to
Please stop using dashes to simulate a blank space. If you want a blank space wherever you use a return keystroke, then:
- Write the post normally, with returns for paragraph breaks.
- Before you submit the post, go to the “Input Format” link at the bottom of the post box.
- This will expand to three options.
- Choose the last option, Markdown.
Then preview the post and then submit it.
You will have to make this choice for every post you make.
Ok the math shown on the IK
Ok the math shown on the IK page is incomprehensible to me. I just learned algebra a couple years ago and never was much good at it. you know of any tutorials I can learn the equation with?------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ to be honest I started this project after seeing a video in which a guy was using PS2 controller with a Lynx motion servo controller. Would this be easier for me?
Oh for power I have 2
Oh for power I have 2 options. I have a step down rated at 2A which is what my servos are rated at that i set to 5.2V for any battery I use. Or I also have coming a 100w 12A DC-DC Buck 5-40v 24v to 1.2-36v stepdown converter. -------------------------------------------------------Http://pages.ebay.com/link/?nav=item.view&alt=web&id=131502367750------------------------------------------------------------------------------ I read somewhere about using a rectifier bridge but I have no idea what or why. I also plan to jump the two power inputs together to provide power to both the servos and the board. Now I think someone said something about jumping a capacitor which I have between either the servo or board power to the ground? Won’t that short it out? Oh and which setup should I use to power up my project?
When you say I need a good
When you say I need a good 60 degrees of freedom. If a vertical line is 0* do you mean 60* each way or 30 each way. Also I found a couple kinematics calculator apps, would it be possible to use one of these Apps?
Ok I understand
Ok I understand now.------------------------------------- Ok cool I was getting nervous, never was very good at math. Although I learned Algebra a few years ago.-------------------------------------------------------------------------------------------Well I kinda want to use this program. But in order to so I need to know the orders in which the legs move and thier individual servo movements. I also need a good tutorial on servo time and speed. I can experiment after that. -------------------------------------------Any opinions on the power options I listed above.
Ok what exactly do the
Ok what exactly do the numbers in the serial blocks represent. I’m pretty sure the 1500 refers to the servo being at neutral position. If I move it to 1000 it should turn 90 degrees clockwise and if I move to 2000 from there it should go 180 degrees counter clockwise with the numbers in between giving you different degrees of rotation. The second number is what I don’t understand. When I move the slider to the left changing the input pulse the other number goes down with it one at a time so if I put it on 1499 in the left box the right box reads -1. If I slide it right say to 1522 the right number counts up with it giving a value of 22.
I have to stop reading this
I have to stop reading this thread until you finally learn how to creat real paragraph breaks.
Either use the default input format and put a newline and a “<p>” before each paragraph or use the third input format choice “Markdown” and just enter text normally.
Very few other people have trouble beyond their first couple of posts. Please take the time to learn this system so that others would be more willing to read your posts, and hence be willing to help you.
You my friend are
You my friend are awesome!!! Ok I tried the equation though and came up with -1153. My order was 30 X 4160 / by 360 -1500. What exactly is the 4160 value and how did you come by it? -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Ok I found some reference pics to the gait and two more gaits like the ripple. So now I what coxa’s move in what pattern but I still need the Femur and tibia movements. --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- Yes please send me link to the floating point video. Because I still don’t understand what that is.
Ok here’s my
Ok here’s my movement------------------tripod gait. 123 456 going vertices. Legs 1, 3, 5, femurs up 5-10*, tibias up 5-10*, coxa’s move forward30* end of sequence.---------------- Right side tripod gate. Legs 4, 6, and 2 with 1, 3, and 5. 1, 3, 5 femurs and tibias move down 5-10* while sweeping backward 60*. Mean while 4, 6, and 2 are lifting thier femurs and tibias and moving forward 30 degrees. With the next two sequences the legs move 60* or from thirty to thirty from neutral. That should propell me forward and look a lil convincing. ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------I’m curious about the angles of the legs. I’m going to make the femurs and tibias like you show in the pic above where the tibias are at 90* from the femur/coxa. But I want it to walk with it being in a crouched position. How do I make up for that? I would also like to be able to raise and lower the chassis to walk high or low.
I put my power system
I put my power system together today. Its a 3s battery with a 2A stepdown set to 5.29v with a lil on off switch. After I soldered the switch I soldered the jumper wire for the servo VCC and then soldered the tips of the wires so they won’t fray. -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Here’s a pic.
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- So I hooked it all up and ran a 1500 sequence to center everything and I was quite off. On the other hand the board has no problem pushing the servos with my power set up. So that’s good. ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ I’m still learning the basics of C,C++ so I’m gonna wait a lil while before I start trying to develop or copy a code that way I understand what I’m doing. Until then I can still program up to 12 functions I can make the bot do with the controller. And I don’t mind the tedium of programming each sequence.
Made all my calculations for
Made all my calculations for movement using the sequencer. I started out at 1500 @ 0* to 500-2500 @ 90*. I did notice this, when calculating the time using 90* you get 460 instead of 500 & 2500. And 0* you get 1488 instead of 1500. Is this ok? Will it mess with any thing? ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- I noticed while playing with the sequencer that there is a window in the tool bar to the right. It’s labeled “Time”(ms) and gives a box to change the number. Do I need to worry about this box?
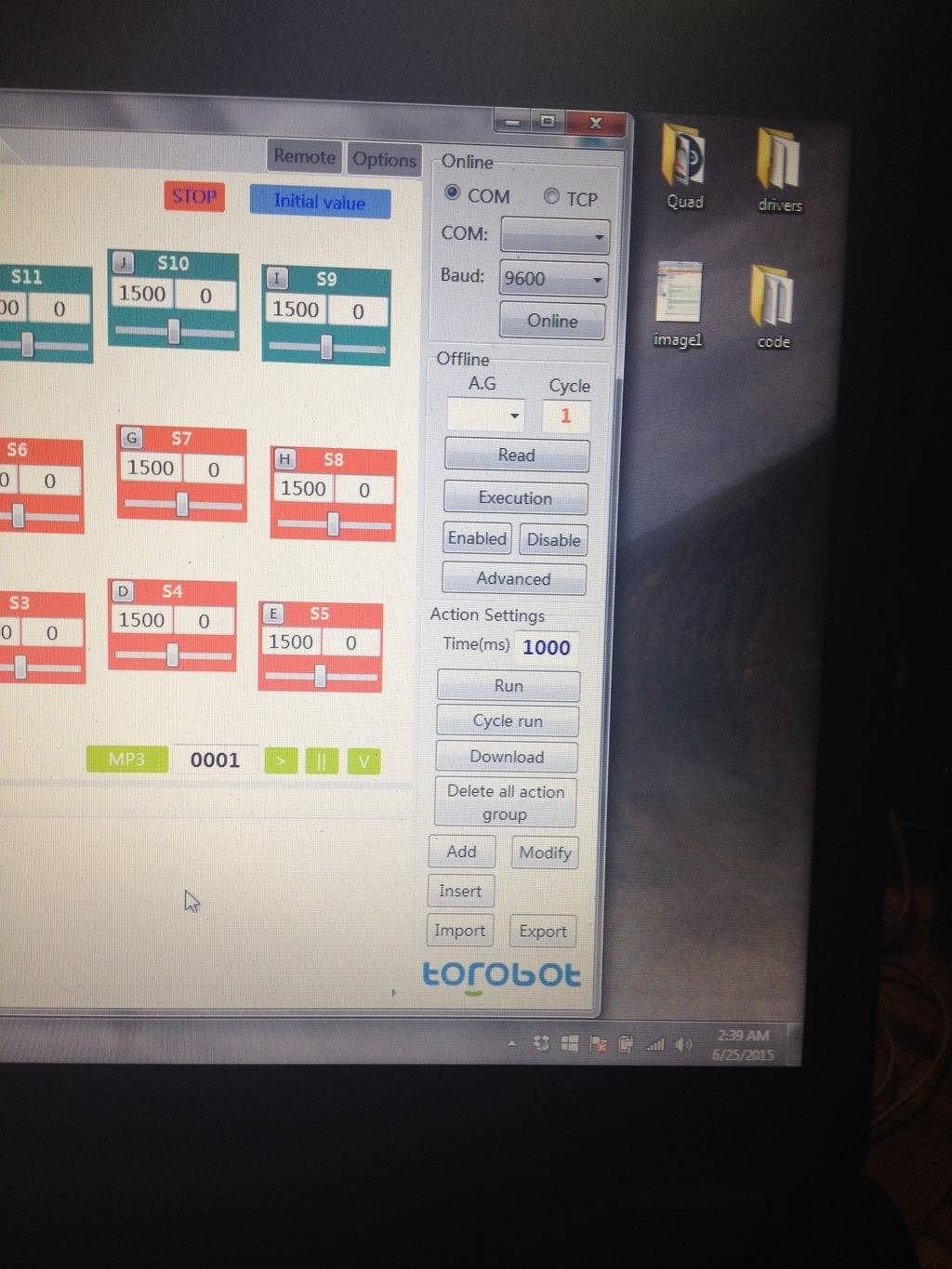
The instructions above say that after making the sequence I should set the rotary speed? Using this block. What exactly is rotary speed and how do I calculate it?
I was waiting for a smaller
I was waiting for a smaller set decks but they came today and were too small for the servos to fit with out running in to each other. Then I spent the rest of the trying to make sure everything was aligned properly. Which included, hooking all the servos up to the board adding power and using the sequencer to center them then re-attaching each part. Lost two servos in the process and tried to rebuild one but that was a no go. Need to figure out why they burned up though. Question. Could it be that I’m leaving the switch on too long while I’m adjusting it? I would think after running a cycle it would kill the juice.
Ok I give. I need help
Ok I give. I need help either coding or sequencing. I tried using the sequencer to make a tripod gait. The legs lift and move but it stays in one place. I lifted each leg 25* and rotated each leg 25 both directions.
(No subject)
--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
In= lifts leg up N= neutral 90* R=rotate reverse F= rotate forward.
Please use real paragraph
Please use real paragraph breaks. To do this in here you either use the HTML paragraph tag at the start of each paragraph, <p>.
The second way to do this is by using two returns at the end of a paragraph to make a blank line, click on Input Format below the text box and then choose the last option, Markdown.
Neither one of these are difficult and it will make your posts easier to read. I typically use Markdown.
blah blahBlah blah
Sorry must not have seen that. And thank you!
Ok been playing around with it. Can't seem to get the PS2 controller to enable. Partly because I don't know since it's written in another language and alphabet.
I Would like to code it but I have no idea where to start. I looked for source code but every page claiming to have it doesn't. Only problem is I will need to code each command seperately to get the PS2 controller to control it off line. Hell I'd even pay someone to write the code for me at this point.
I would like to buy better servos. Are the MG90S better for what Im trying to do?
Waiting on battery to charge, thank you will try your instructions.
I think I might have the PS2
I think I might have the PS2 controller hooked up wrong.
Hers a pic of the way a 32 channel is hooked up.
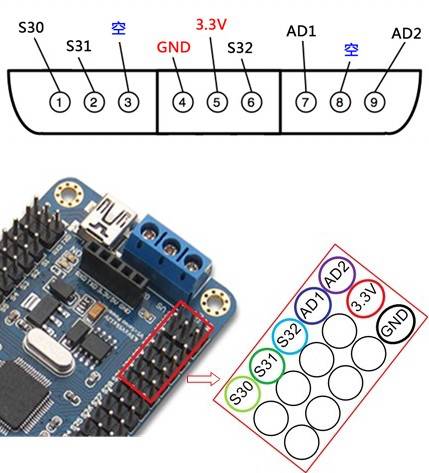
I hooked the 2 AD wires to the AD inputs connected the ground and power. But I don’t have an S30, S31, or S32 so I hooked those up to S22, S23, and S24. Any guesses?







