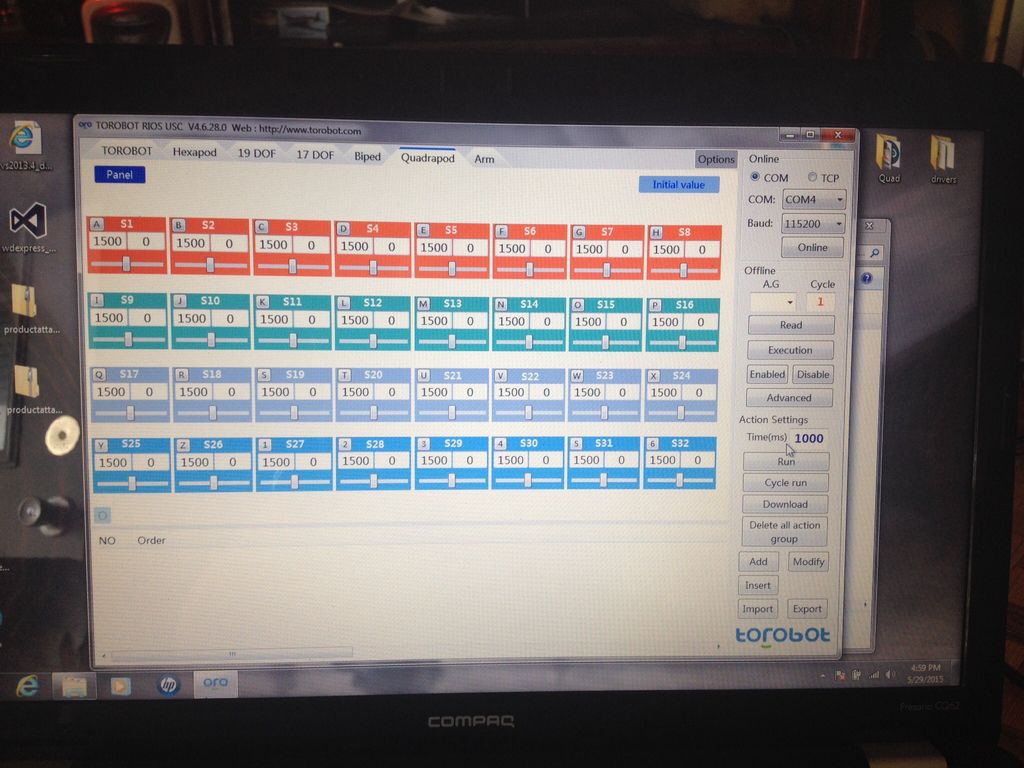
I ordered a 24 channel arduino compatible servo controller to use for a quadruped I’m building. It arrived today and I was able to research it a lil. Found out it’s a Torobot chip on one site that also had the drivers and software. I managed to install the drivers so the computer will recognise it and downloaded the software. What came up was this
I read a short article on badji and it said this software can control the robot. I looked at the instructions and it gives a vague description of how to operate the software. And I have no idea what it all means. Is there someone out there that can help learn how to use this program please.
Also saw in the instructions that for it work properly both green lights should come on to let you know the servo power and the chip power is working properly. I know the computer can drive it through the USB but the servo led does not come on when plugged in. Is this maybe cause it has no programming or do I have a bad board.
im pretty sure this will im pretty sure this will control everything it says you can download the action list for using offline via the wireless controller (ps2) and reciever. It even gives a controller menu with the software to set up ps2 controller functions.
" the servo controller is a " the servo controller is a slave device, meaning that it either accept commands or execute preset commands."
I can download preset command to the board then use a wireless controller to execute commands.
Directions say you “can” use a seperate micro controller but why and how does that work. But it’s also advertised as having its own on board micro controller.
Please explain.
Also how do I break paragraphs up on this forum? I’ve tried five blank lines inbetween each paragraph and it puts it all together and randomly at that.
Ok I performed another Ok I performed another experiment. I went ahead and copied Bajdi’s code found here …http://www.bajdi.com/torobot-32-channel-servo-controller/ …into my notebook on windows. I then imported it onto the bottom screen and hit run. What I get is a continuos void loop error that makes me have to reset the computer. Im pretty sure it’s my syntax (been learning c,c++) but what code line is wrong I haven’t deciphered yet…I learned on the C++ tutorial that I need a int main() function so the compiler will run it. Could that be my problem. Also I think I need to include the servo port #3P1500 but where?..Stil haven’t figured out the symmetry problem though to check out the other functions.
I found the example files I found the example files for the Torobot program. I would post them but it will just jumble up and make it hard to read. Might take pics. Any way the only thing I’m still trying to figure out is what the servo symmetry stuff does. I could write and modify code on the program if I could figure this out. …------------------…
Setting window opens up has 16 rectangles. Above the rectangles are the servo serials you are using. It’s literallly says:: “please drag the symmetry servo into the same box”. If you drag the serial boxes and put more than one in a box it says above the last quote 4=5, 4=6, 5=6. …------------------------…When the m.buttons or modify buttons are pressed it says " set the correct symmetry required relationship. Please help!!!----------------------…-----------------…------------any body looking for the example files please PM me.
What other ways could I make no problem the link is…-------------------…https://www.dropbox.com/sh/35qdxrof5tzx878/AAB0RrLcoQvyj7rAvYEYG2Fca?dl=0 …----------…sorry didn’t mean to be rude. Thank you for pointing that out. The whole reason I wanted to share was so everyone could hopefully get around having to use a seperate MCU with these boards. The servo symetry is what’s stopping us from modifying imported code in program. Thanks to any body who can help.
Check this out. I made an Check this out. I made an updated manual that tries to explain the program better. It includes links for OG manual, drivers, examples and every thing else. I Also included pics. I hope this helps too.
Got a question. I was Got a question. I was looking at the examples and noticed there were 3 files a .cpp, a .h and a .pde. I know from the c/cpp tutorial that these files compile to form the .exe. I can compile them through visual studio but I don’t think the board will understand it. The code screen only accepts .txt. Do I just load the three files to the board one at a time and one right after the other?
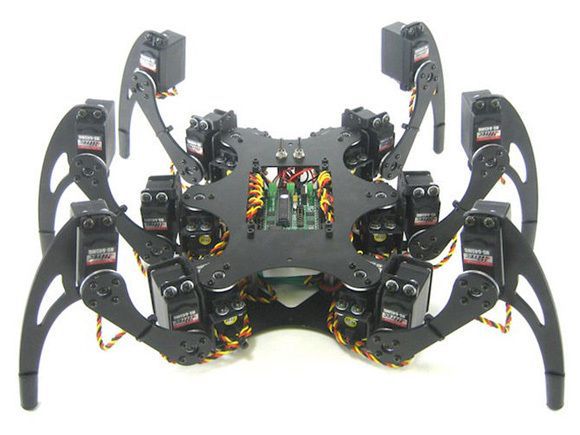
All right guys. I need a lil All right guys. I need a lil geometry help and some basic measurements for two 9g servo spider Hexapod chassis plates. That look like this. -------------------------- -----------------------------------maybe someone has a template? Any help would be greatly appreciated.
Thank you. I was gonna get Thank you. I was gonna get the ICStation but wanted the spider body instead. I love your Halloween hex. ----------------------------------------------------------------------------------…-----------------------------------------------------------------Are the top measurements for movement? Sorry I don’t understand.---------------------------------------------------------------------------------------------------…---------------–------------------------------------------------------------------------on the bottom measurements, are those all total numbers or just to the center of the servo mounting holes?
All right. I’m going with All right. I’m going with these legs and coxa’s found here.---------------------------------- https://www.robotshop.com/letsmakerobots/node/34207 --------------------- Are the values gonna change since the coxa will be a squared unit of two servos?
Ok here’s my final draft. I Ok here’s my final draft. I shrunk it 1CM all the way around and used 22mm diameter circles for the servo holders. I plan to just screw my servo horns straight the deck. But hoping to get the gear printed into it. The //////////// shaded rectangles are openings for servo wires and power and what not. I also used 58mm diameter circles to create the curves.
Got my leg pieces today. Got my leg pieces today. They are nice and tight and made of pla. The femur pieces won’t fit the servo star but I can fix that. I went ahead and had the decks printed too.---------------------------------------------------------I look at other people’s prints and notice that they are completely smoothe and shiny. How does happen. Mine all have the extruder lines. ----------------------------------------------------------------------------------------
Awesome thank you. I killed Awesome thank you. I killed a couple servos putting the legs together. I got curious because they snapped at all and rather easily. So i opened it up and found these totalled gears. Do they look at all like they could be carbon fiber?
Heres a pic of a finished leg. All set to 0 or at least as vlose i could get them.


 -----------------------------------maybe someone has a template? Any help would be greatly appreciated.
-----------------------------------maybe someone has a template? Any help would be greatly appreciated.



