From day 1 on LMR, I have been nothing less than INSPIRED.
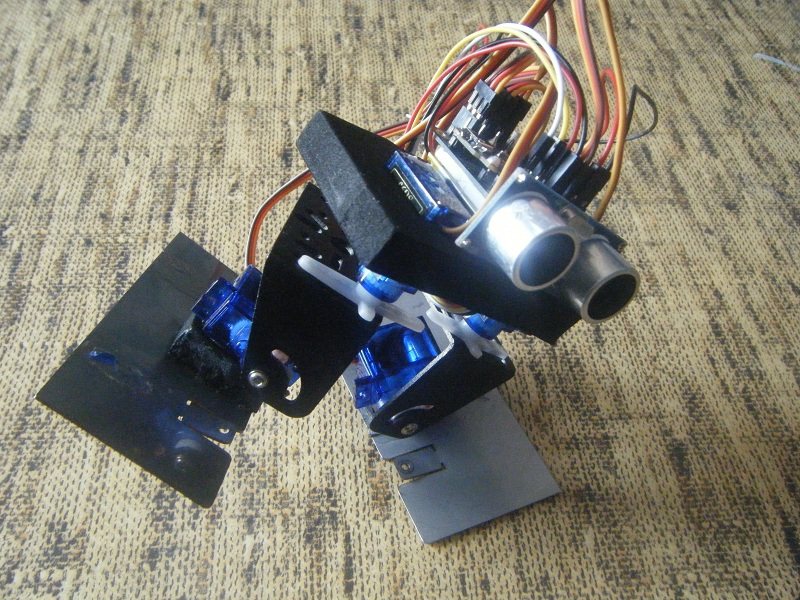
This Bi-Ped, too, is a result of some pretty cool two legged creatures on LMR. I am still thinking a name for this one. With no access to a 3D Printer, I tried to give him the "Bi-Ped look" from a bunch of things that were not meant for him ( Zumo Chassis Blades, Pan-Tilt Bracket, etc.) and a couple of styrofoam blocks. It all turned out to be pretty well in the end. Right now, I am trying to teach him how to walk. I have been closely following BoB and TED to learn more about how this thing moves. I did have a fair idea of the servo positions and configurations, but there was more than just that. Protowrxs provided me a glimpse of the movement via a sketch in the shoutbox. Kevin and Birdmun made life easier for me by directing me to the BoB Poser Software. If all things work out as planned, he should be able to perform a couple of moves by the end of next week. Until then, here's a picture of how he looks. More updates to follow soon!
Thanks Birdmun! I thought about accessing the other 4 digital pins, but the 3 analog pins could easily function as digital pins at the moment. So, the Beetle was perfect for controlling the 4 servos, with the extra pair of digital pins used for the ultrasonic sensor.
Awesome While waiting you could sweeten our eyes with some more pictures. I know there is not much to show (you think that) but I am sure we will enjoy that. I see the potential by using non-standard parts instead of precise fitting 3D printed parts.
I’ve used the four pads on the bottom of the Beetle (RX, TX, SCL, SDA) as the motor pins for my MB3434 micro robot to keep all the other pins available for sensors and other things.
Thanks Lumi. Wow, this Bi-ped seems long gone. It’s been taken apart right now as most of the servos do not seem to like screws at the moment. But the parts are all in place and I hope to pick it up soon enough to get things started once again. This one never walked perfectly, and it was foolish of me not to take a quick video of a wobbly bi-ped!
Anyways, I now have access to the underneath pads of the beetle. I could not desolder the beetle off the shield so I was inclined to snap off the header pins. Which is why I have the picture below for you to see!
Ok, no video…now you know what you have to do first before disassembling anything
The PWM pins on the Leonardo are: 3, 5, 6, 9, 10, 11, and 13, so no, those four pins does not support that feature except #3. I am running those gear motors just with LOW and HIGH commands as they are slow enough. If you need them slowing down then you still can time the HIGH and LOW to get the duty cycle to a lower number.



 But the parts are all in place and I hope to pick it up soon enough to get things started once again.
But the parts are all in place and I hope to pick it up soon enough to get things started once again.  This one never walked perfectly, and it was foolish of me not to take a quick video of a wobbly bi-ped!
This one never walked perfectly, and it was foolish of me not to take a quick video of a wobbly bi-ped!