



Time For A Bi-Ped!
Hello guys!
From day 1 on LMR, I have been nothing less than INSPIRED.
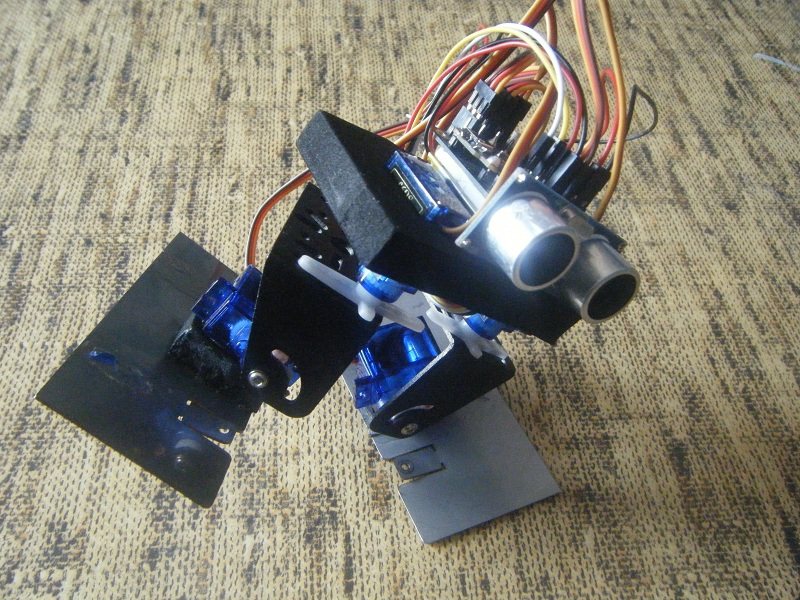
This Bi-Ped, too, is a result of some pretty cool two legged creatures on LMR. I am still thinking a name for this one. With no access to a 3D Printer, I tried to give him the "Bi-Ped look" from a bunch of things that were not meant for him ( Zumo Chassis Blades, Pan-Tilt Bracket, etc.) and a couple of styrofoam blocks. It all turned out to be pretty well in the end. Right now, I am trying to teach him how to walk. I have been closely following BoB and TED to learn more about how this thing moves. I did have a fair idea of the servo positions and configurations, but there was more than just that. Protowrxs provided me a glimpse of the movement via a sketch in the shoutbox. Kevin and Birdmun made life easier for me by directing me to the BoB Poser Software. If all things work out as planned, he should be able to perform a couple of moves by the end of next week. Until then, here's a picture of how he looks. More updates to follow soon!
See you guys later!
Ashim
Walks around, detects objects
- Actuators / output devices: 4 x SG90 Servos
- Control method: autonomous
- CPU: ATmega32u4 aka Beetle
- Operating system: Arduino
- Power source: 3.7V Li-Po
- Programming language: Arduino C
- Sensors / input devices: HCSR04 ultrasonic sensor
- Target environment: On top of your desk!