The TROLLER 1D is my newest robot project. The concept uses a series of simple 'links' to make up the TROLLER. Its locomotion can be similar to that of a caterpillar or snake while laying flat, but the novel concept is that it can roll itself into a large circle and still propel itself (like tank treads) by shifting links in the proper sequencing.
Right Top: Video demonstrating the TROLLER 1D prototype.
To the right is a video of the initial servo controls test. I plan to verify and finalize the design before joining the three units together and developing the rolling algorithms.
The other video (below right) is of the original prototype testing from earlier this spring.
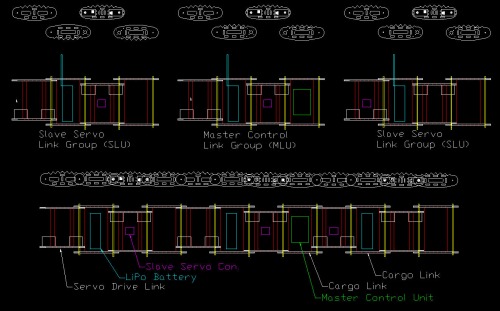
Below is drawing showing the newest CAD layout and the design I'm putting together now.
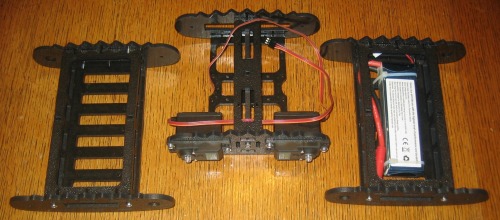
Below are the first 4 links, This is the Master Control Link Group. It consists of a battery back, 4 servos, a Pololu Maestro controller, and the Arduino Mega master controller with an MPU-6050 Initerial Measurement Unit. I'm also trying out a Wixel Pair for wireless communication and programming of the Arduino.
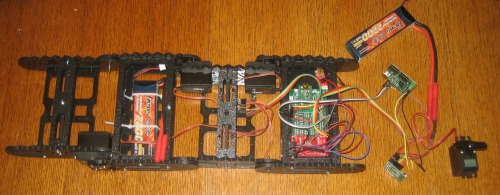
Currently I have assembled acomplete second iteration of the prototype (shown above).
The goal is to refine the crude prototype design into a functional robotic product kit. The first version will be the TROLLER 1D. This version of TROLLER will only be capable of moving along 1 dimension. By limiting the focus of this project to a single dimension, I will be able to perfect the initial two concepts --'Propulsion by Self Rolling' and 'Crawling'.
Propulsion by Self Rolling works by shifting the links in sequences to rotate itself around the perimeter. To refine this concept the TROLLER 1D will use motion sensing capabilities like the sensors found in a Wii remote (accelerometers and gyroscopic sensors). These sensors will allow the control programming to learn how to roll at different speeds, how to change directions, and how to transition into crawling mode. Crawling propulsion will be achieved by mimicking the movements of a caterpillar. Proper sequencing of the servos will allow smooth transitioning.
A robot that can crawl or turn into a circle and roll itself around for locomotion.
Control method: Arduino Mega, Wixel, Qty 3 Pololu Micro Serial Servo Controllers
I did get it to roll all the way around once, it wasn’t very smooth and hit kinda hard and then stripped out a servo. It really needs some motors with a little more torque (which is why I just started a Kickstarter project for it).
The design isn’t quite ready to be shared; it is going to be drastically revised. I learned a lot building and testing it so far. It needs to be wider so it’s more stable, better wire routing (with places to zip tie), distributed locations for battery packs (to balance the weight), and probably add a WiFi interface to control it.
Thank you for the kind words, I’m looking forward to refining the design and figuring out how to program it.
When I read your comment about stripping a servo the first thing that came to mind was these magnetic servo clutches. Not sure if you can get them in the size required to suit the servos you already have, but it might be worth looking into.
Fantastic project, really interested to follow the continued development =)
Wow, this is rather Wow, this is rather impressive. There are many people who feel that they are mechanically inclined enough to make something like this work who can truly learn a lot from you. Thank you for sharing.
Building robots like a stallion is something that a lot of people want to do but somehow they can't figure out how to make them work properly without training.
Thanks for the input. I’m already planning some of that. The parts I’m making now are 3 groups of 4 links (12 small links total), I’m using 3 batteries, 3 distributed servo controllers, one Arduino Mega, and an IMU unit. The weight will be evenly distributed around the circle. The initial focus will be on making whole thing roll up and move back and forth.
I should have it together and ready to start testing over the next two weeks. I’m getting anxious! ;-)
I’m not sure yet. I’ve had some inquires about possible commercialization but I still have much work to do on the design to make it work reliably before I could continue that discussion or openly release them. I’ll figure that out as I get furthur along.
hey man…hahahahaha…i almost scream with that… spectacular…awesome… a robot like that could work on the special forces, in army, im not telling jokes, i really think that, i see special skills to climb up things, like structures.... dont you mean in something like that?



 im really looking forward to see more progress
im really looking forward to see more progress 