



The TROLLER 1D - New Prototype Test Video
The TROLLER 1D is my newest robot project. The concept uses a series of simple 'links' to make up the TROLLER. Its locomotion can be similar to that of a caterpillar or snake while laying flat, but the novel concept is that it can roll itself into a large circle and still propel itself (like tank treads) by shifting links in the proper sequencing.
Right Top: Video demonstrating the TROLLER 1D prototype.
To the right is a video of the initial servo controls test. I plan to verify and finalize the design before joining the three units together and developing the rolling algorithms.
Latest Updates here: http://trobotown.com/index_files/troller.htm
The other video (below right) is of the original prototype testing from earlier this spring.
Below is drawing showing the newest CAD layout and the design I'm putting together now.
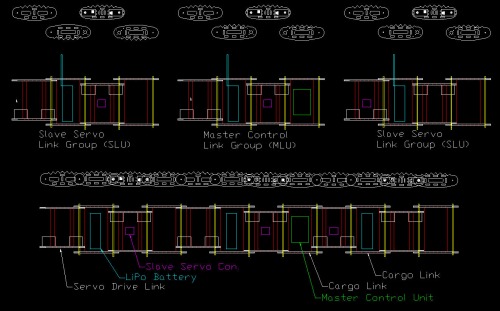
Below are the first 4 links, This is the Master Control Link Group. It consists of a battery back, 4 servos, a Pololu Maestro controller, and the Arduino Mega master controller with an MPU-6050 Initerial Measurement Unit. I'm also trying out a Wixel Pair for wireless communication and programming of the Arduino.
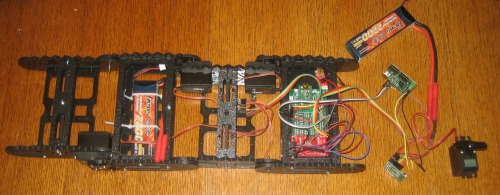
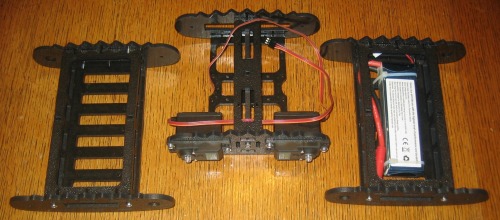

Currently I have assembled acomplete second iteration of the prototype (shown above).
The goal is to refine the crude prototype design into a functional robotic product kit. The first version will be the TROLLER 1D. This version of TROLLER will only be capable of moving along 1 dimension. By limiting the focus of this project to a single dimension, I will be able to perfect the initial two concepts --'Propulsion by Self Rolling' and 'Crawling'.
Propulsion by Self Rolling works by shifting the links in sequences to rotate itself around the perimeter. To refine this concept the TROLLER 1D will use motion sensing capabilities like the sensors found in a Wii remote (accelerometers and gyroscopic sensors). These sensors will allow the control programming to learn how to roll at different speeds, how to change directions, and how to transition into crawling mode. Crawling propulsion will be achieved by mimicking the movements of a caterpillar. Proper sequencing of the servos will allow smooth transitioning.
A robot that can crawl or turn into a circle and roll itself around for locomotion.
- Control method: Arduino Mega, Wixel, Qty 3 Pololu Micro Serial Servo Controllers
- Power source: Qty 3 - 7.2V 2200mAh Battery
- Programming language: C, LabVIEW, ABB's RobotStudio