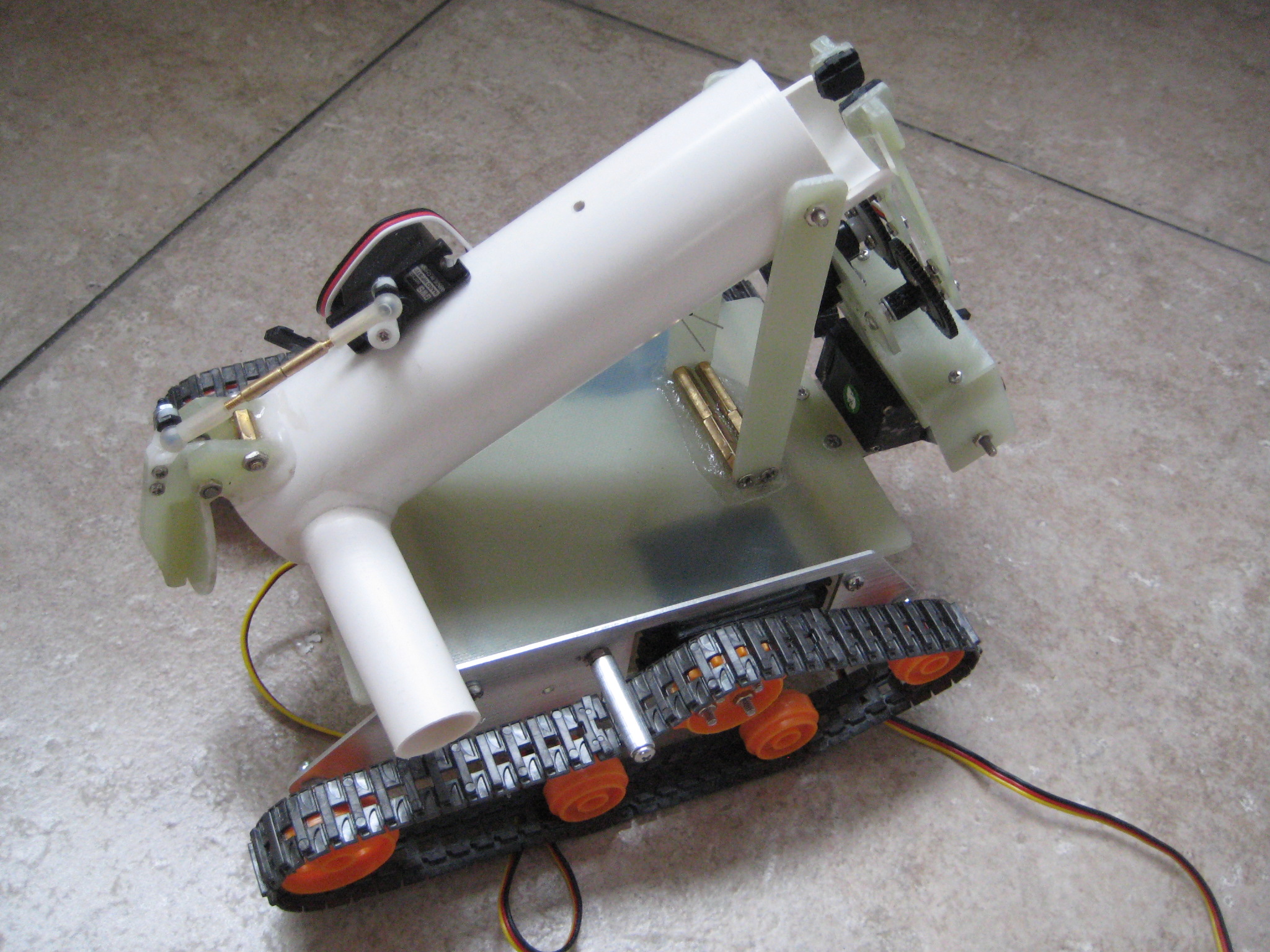
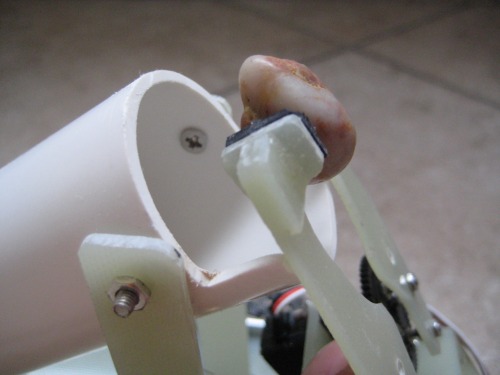
This is my current robot study. TETUBO surveys small stones and rocks. The stones or rocks are picked up with a simple gripper mechanism. The rock sample falls in a kind of oversized test tube. In the moment only the radioactivity of the sample will be measured but many other sensors are possible. When the survey is finished the hatch on the other end of the test tube opens and the sample drops out.
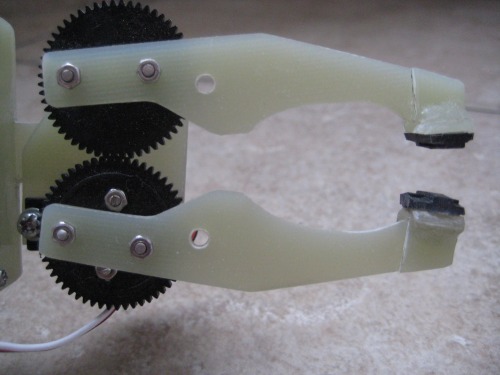
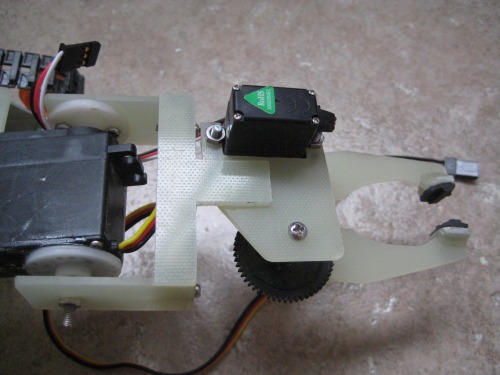
this one is really nice, Something caught my attention, In my opinion you could have simplified the gripper, ever seen those lego nxt, they use rubber bands for it, i am in no way critisicing, as stated it is just an opinion, other than that this one is great, way to go
Coolness! Do you have a video yet? And is there a purpose for those surveys or it is just for fun? Your mechanics are nice as always. What is that material you use for constructing your robots?
That’s an interesting track configuration. It looks like you could have used the horizontal bar that is lying on top of the track as a track tensioner by making it’s position adjustable up/down a cm or so. Maybe it is unnecessary for your robot. I mention it because I have never seen the tracks configured that way and it would make for simple adjustments if someone needed to.
Anyway, very cool robot. Can’t wait to see a video.
It’s actually a Parallax Boe-Bot Robot Tank Tread Kit and a bad design (I can not remember why I bought it :)). I adjusted the position (height) of the track drive wheel, but the tracks always jumped out at the smallest friction, so I added two castors. Now it works fine even on rough surface.
My plan for the metal detector is quite simple as the sensivity need to be not very high (the rock sample drop through the coil). I also don’t have a ground effect so I will not need a Faraday shield. I will build a simple LC oscillator with a 555. When a piece of metal is brought close to the coil, the output frequency changes.The output frequency will be measured by a connected Picaxe 08 by the count command.
I was trying to fiqure a way to make a servo powered gripper. The one your robot uses is perfect. great job! However what is the number of teeth your gears are?