



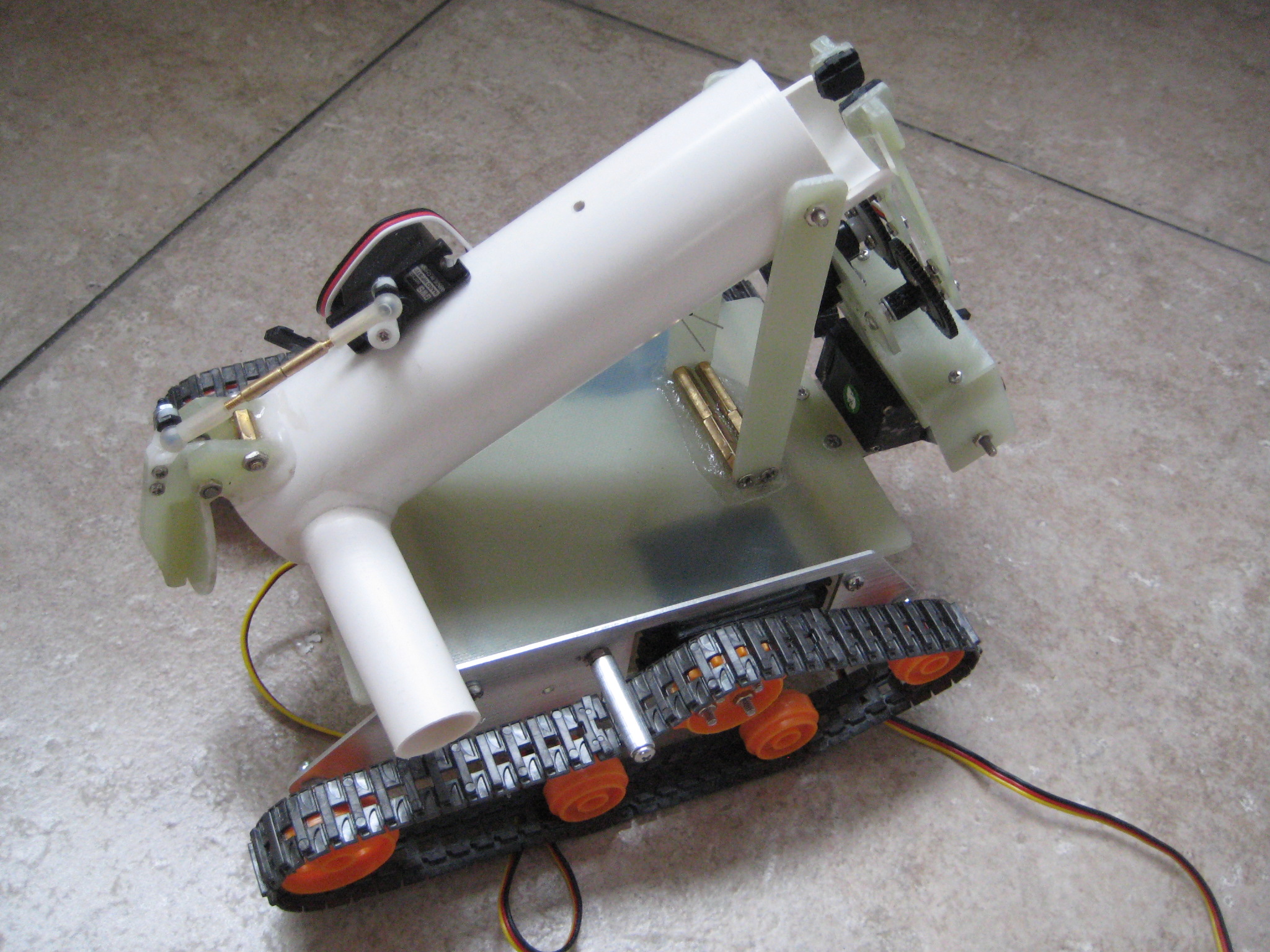
TETUBO
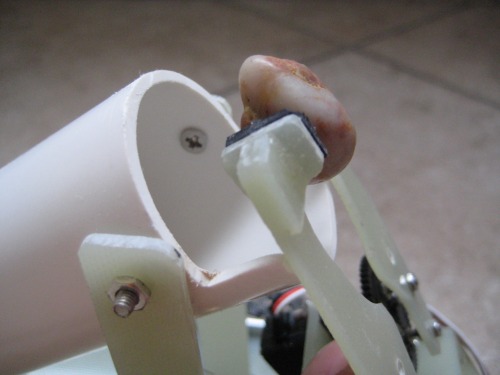
This is my current robot study. TETUBO surveys small stones and rocks. The stones or rocks are picked up with a simple gripper mechanism. The rock sample falls in a kind of oversized test tube. In the moment only the radioactivity of the sample will be measured but many other sensors are possible. When the survey is finished the hatch on the other end of the test tube opens and the sample drops out.

2010.9.28
Found simple possibilities to add other sensors ---
a) Metal detector to check if the rock sample has metallic inclusions. The detector coil is directly wound around the test tube:

b) Hall effect sensor to check if the rock sample is magnetic.
TBC
Surveys small stones and rocks
- Actuators / output devices: 5 servos
- Control method: RC with MCU aid
- CPU: Picaxe 28x1
- Power source: 7.4 V 3000 mAh Li-Po
- Sensors / input devices: Geiger counter, transmissive light sensor
- Target environment: outdoor