This was my first robot.In the very beginning it was supposed to be a simple picaxe shield of my own.
I then thought I could add a "body" to it and discovered LMR.
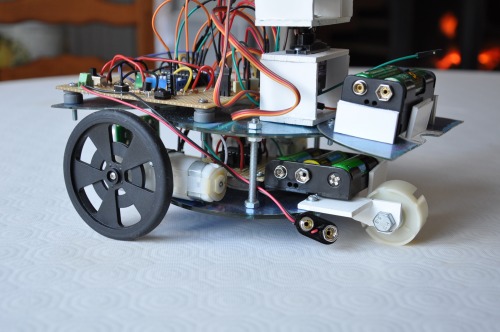
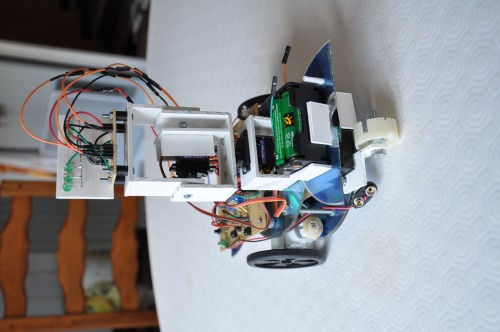
In a second time I did add a simple "pan and tilt"... with someting on top...
I now need to disassemble it for the parts, so I'm taking myself by the hand, to make this post to thank LMR community, as I do think I owe LMR for many ideas I took from.
- Old CDs frame
- GM gearboxes
- GM wheels
-...
PS : I didn't find out how to cancel the exif information about image rotation. Sorry for that !
Navigate around via ultrasound, plays tones, IR remote controled or autonomous
Thanks for sharing. Hope to see more robots from you in the future.
Free online photo editor: http://pixlr.com/express/ There are different options, if you just go to pixlr.com, but, I thought the express option would probably be sufficient for you.
J’avais pas vu que tu était français sur mon post " tarantula " , on est pas beaucoup ici…
Tu ma dit que tu compté utiliser 8 servo pour ton futur marcheur, je connais l’ordre de fonctionnement des jambes des hexapode ( 12 servo ) pour qu’il ce déplace comme il faut, mais pour un quadri je ne me suis jamais penché sur la question.
Il faut faire des test et encore des test pour arriver à un bon résultat !! mon j’utilise la commande “pulsout” pour le controle des servo elle fonctionne sur toutes les pin des Uc, pas comme la commande “servo” qui desfois ne passe pas…
En tout cas si tu galére envoi moi ton prog’ et je regarderai ce que je peut faire, j’ai fait de gros progrés en peu de temp il faut écrire encore et toujour plus pour progrésser rapidement et surtout bien connaitre le fonctionnement des ça machine et/ou robot.
I had not seen that you were French on my post “tarantula”, there is not much here…
You told that you counted 8 servo for your future Walker, I know the order of the legs of the hexapod (12 servo) operation so it it moves as it should be, but for a quad I do never looked into the question.To do the test and the test still to arrive at a good result! My I use the command “pulsout” for the control of the servo it works on all pins of the CPU, not like the command “servo” that sometimes does not…
In any case if you galley send me your prog’ and I will look what I can do, I made great progress in a short temp to write still and always more to advance quickly and above all well know the operation of the ca machine and/or robot.