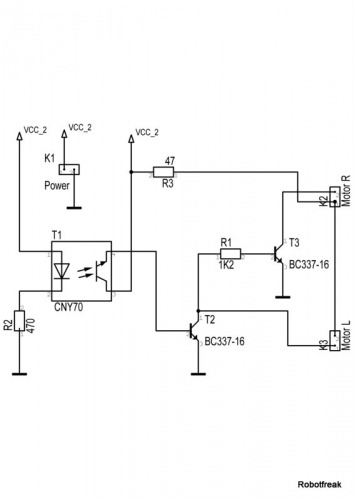
The scematic is quite simple. The CNY70 refelective sensor is connected to transistor T2. On a white surface the photo transistor is on and T2 drives the left motor, T3 is switched off. On a black surface the photo transistopr is off and T2 is switched off, too. T3 is switched on, driving the right motor. This is how the robot is navigating between the black line and the white area.
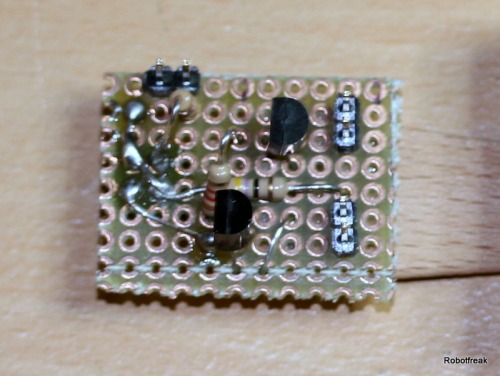
All electronic parts has been placed on a littel piece of veroboard. It is easier to replace the electronics for further work.
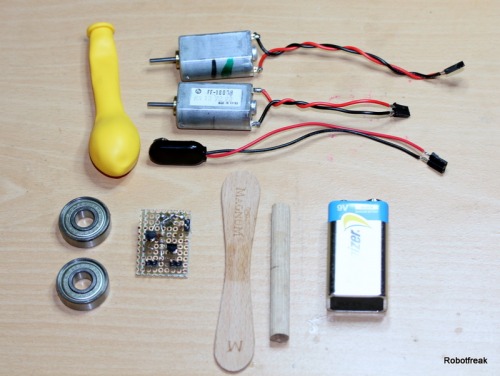
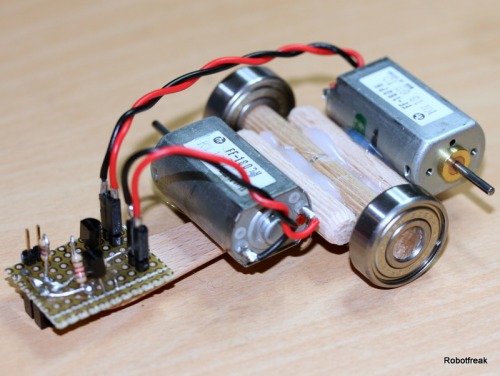
The chassis is made of wood. An ice cream stick holds all the part, attached with hot glue. The motors have no gears. Lline shafts build from a ballon has been used to drive the wheels (standard inline skater rolling bearings).
Further work:
I think about a double line sensor board, a light follower board and an obstacle avoider beambot. Maybe a CPU based version later.
What an awsome little thing! I am truly amazed at it’s simplicity, size, and functionality. The rubber band solution is really a clever solution, and an easy way to do gear ratios on the cheap. Good job!
Thank you guys. In the beginning I was sceptical about the rubber band solution, but it works pretty well. As long as the motors and the axis were in parallel. OK, the rubber bands don’t last long, you have to replace it a lot.
Physics tells that flat belts have the tendency to climb to the highest point of the pulley; wikipedia says: “Because flat belts tend to climb towards the higher side of the pulley, pulleys were made with a slightly convex or “crowned” surface (rather than flat) to keep the belts centered.” Indeed the bearings are flat, but a belt at the edge would “try to slip back”.
I wonder how cheap I can get those parts in quantity. If I could get it down to $5/bot, we could let people pay $5 to build their own bot and take it home.
Hi ignoblegnome, there are different types of the FF-180 motor, e.g. for 3 V. So you necessarily need to build a prototype with the very same type you will get shipped before you buy lots of them. Otherwise you could end up with a stock of parts whitch don’t fit.
I can’t find those FF-180 Mabuchi motors at 12V. All the listings for the FF-180 I see are for 3V motors.
I see the FF-130 at 12V, and the FK-180 at 12V. Is it possible you used one of these?
I’m struggling with the more simple version that Spurt described in his post above. I would like to try one more similar to yours for greater reliability.
I think I might try the PC-130F-10370, available from Jameco. It’s got good torque (which I think is the problem I’m having with my current motors), and a nice voltage range.