



Spurt - Line following Beambot
Spurt is a brainless line following Beambot. It is based on the Spurt-Mobil from the University of Rostock / Tech. University of Berlin. It is a very cheap robot platform, easy to build.
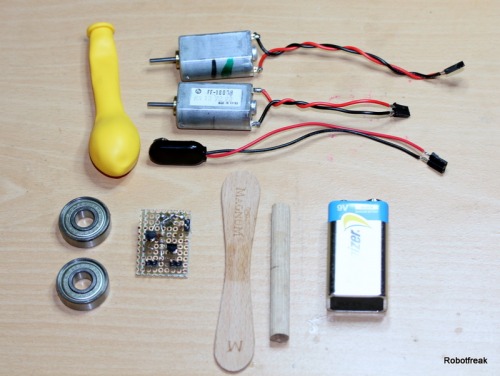
Parts needed:
- 2x motors Mabuchi FF180 12V
- 2x rolling bearings 680
- 6cm round bar from beech 8mm
- 2x wood dowels 8mm
- 1x ballon
- 2x BC337 NPN transisitors
- 1x CNY70 photo reflex coupler
- 1x 1.2kOhm resistor
- 1x 470Ohm resistor
- 1x 47Ohm resistor
- 1x 9V battery
- 1x battery clip
- 20cm wires red/black
- 1 piece of veroboard
- 3x 2pin headers/female headers
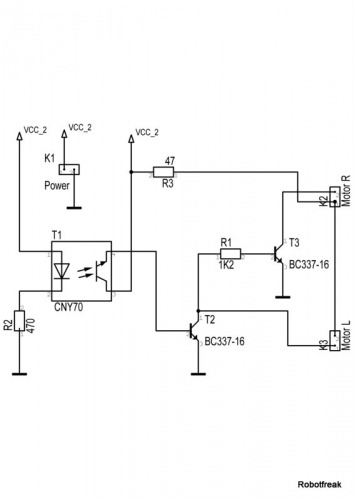
The scematic is quite simple. The CNY70 refelective sensor is connected to transistor T2. On a white surface the photo transistor is on and T2 drives the left motor, T3 is switched off. On a black surface the photo transistopr is off and T2 is switched off, too. T3 is switched on, driving the right motor. This is how the robot is navigating between the black line and the white area.
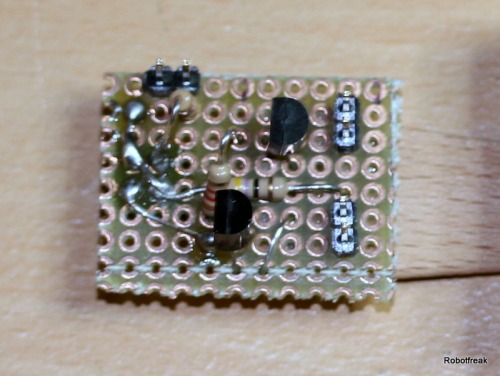
All electronic parts has been placed on a littel piece of veroboard. It is easier to replace the electronics for further work.
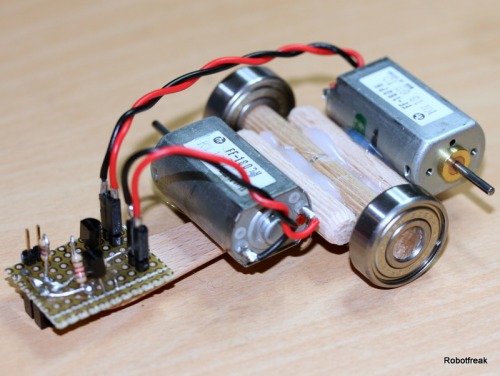
The chassis is made of wood. An ice cream stick holds all the part, attached with hot glue. The motors have no gears. Lline shafts build from a ballon has been used to drive the wheels (standard inline skater rolling bearings).
Further work:
I think about a double line sensor board, a light follower board and an obstacle avoider beambot. Maybe a CPU based version later.
Line following
- Actuators / output devices: 2x 12V motors FF180
- Control method: none
- CPU: none BEAM
- Operating system: none
- Power source: 9v battery
- Programming language: none
- Sensors / input devices: CNY70 reflective sensors
- Target environment: indoor flat surfaces