

Radar uses simple detection filtering to count people, vehicles, or other objects.
This is a companion discussion topic for the original entry at https://community.robotshop.com/blog/show/simple-people-counter-using-radar
Radar uses simple detection filtering to count people, vehicles, or other objects.
Hey,
Got a quick question:
If one of those sensors (bonus sub-question: which one would be most appropriate, if any?) was attached to a moving object and mounted perpendicular to the direction of motion could it be used to count objects that pass its “detection region”, even though the objects would be coming in/going out from the sides?
Also, if yes, what would be the limitations such as relative speed of the objects detected to the moving object the sensor is attached to?
Sincerely,
edit: Added this for clarity:
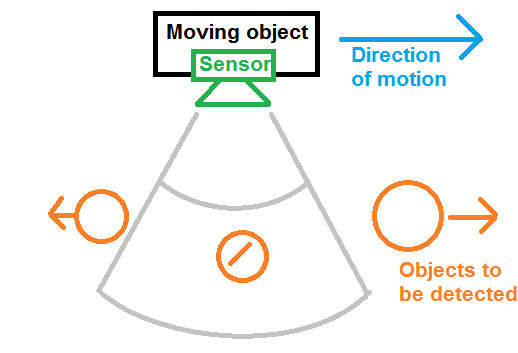
The fact that the sensor is moving complicates things. If the objects are in the general range of detection, you should get a count provided the speed is not too fast.
Thanks for the answer!
What would be considered “not too fast”? I’m assuming there’s not hard data here, but I’m thinking a few km/h (walking to jogging speed). Do you think that would work?
Sincerely,