(Sorry for my english...) This is a simple maze solving robot that I made for an internal robotics competition on my university.
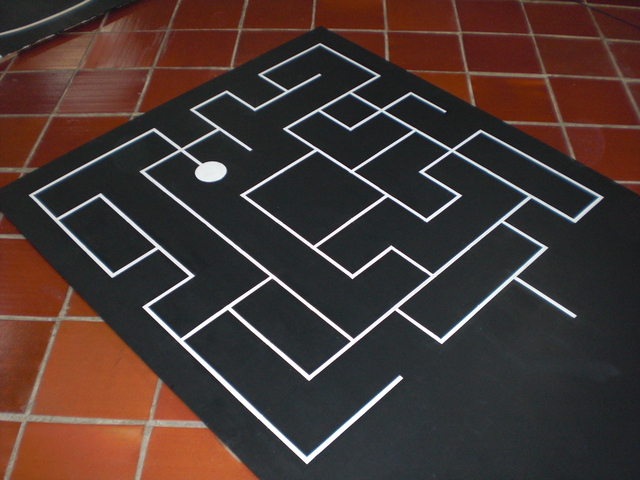
The maze was made with white lines on a black surface, and the robot must find the exit avoiding some obstacles (cubes of wood). If the robot detect an obstacle, it must turn back and recalculate a new way for find the exit.
The maze is previously known before the competitions start.
The maze is stored in a vector or array (1 dimension). Each intersection is represent by an element of the vector with a predefined number. For each intersection crossed by robot, the pointer is increased.
For example, the number 1 is a intersection for the right, the number 2 is for the left, the number 3 do nothing… If the robot detect an obstacle, the pointer jump to another position with the data for the new way.
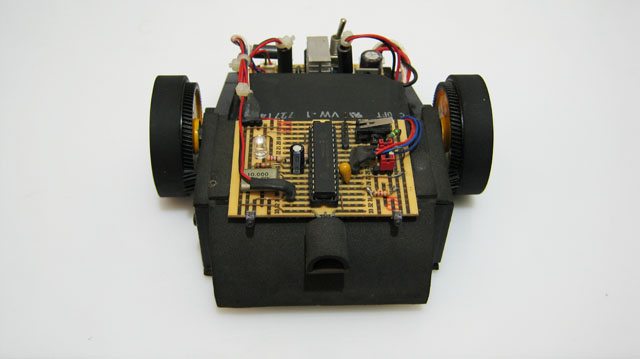
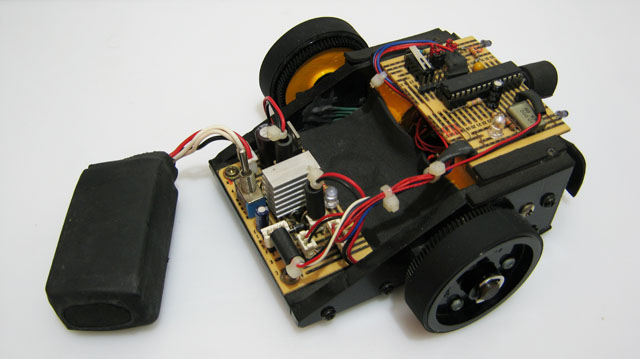
I used 4 phototransistors (like 5mm leds) with a white led to mantain the robot in the line, plus 2 phototransistors (from a old computer mouse) for the intersections. I did not have reflective sensors such as CNY70.