



Simple maze solving robot...
(Sorry for my english...) This is a simple maze solving robot that I made for an internal robotics competition on my university.
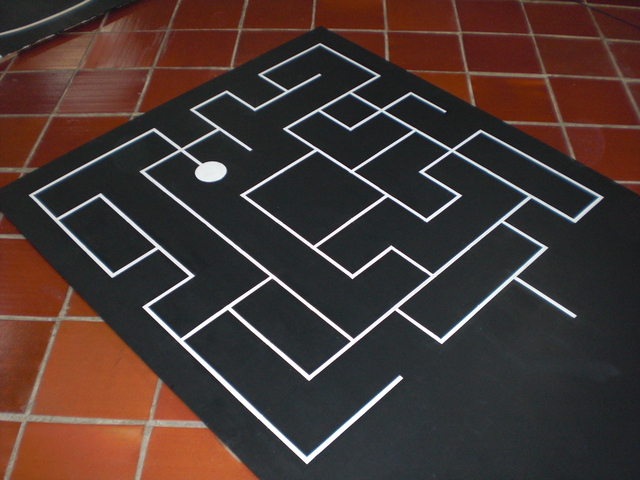
The maze was made with white lines on a black surface, and the robot must find the exit avoiding some obstacles (cubes of wood). If the robot detect an obstacle, it must turn back and recalculate a new way for find the exit.
The maze is previously known before the competitions start.
Some materials:
- 6mm acrylic.
- Black paint and foam.
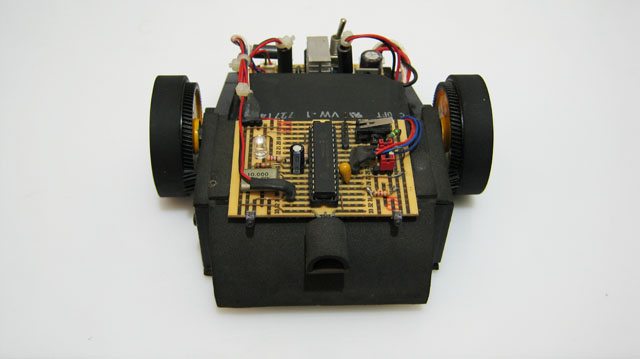
- 2 DC motors (recycled from 2 HP printers).
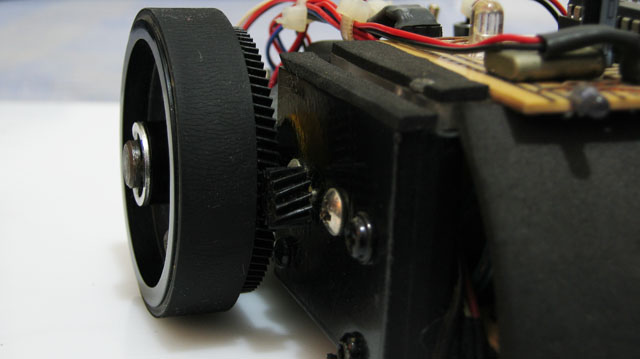
- 2 wheels (rollers from printers).
- 1 PIC18F2550
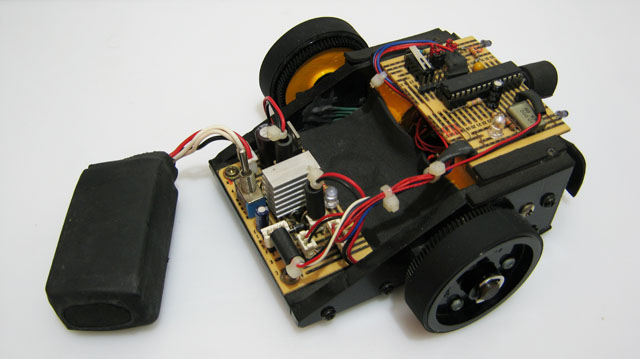
- 1A dual DC motor driver
- 11.1V 1500mAh LiPo Battery.


Solve a maze
- Actuators / output devices: 2 dc motors
- Control method: Atonomus
- CPU: PIC18F2550
- Power source: 11.1V 1500mAh LiPo Battery
- Programming language: Basic
- Sensors / input devices: Six I/R phototransistors, I/R modulated ligth detector at 38Khz.
- Target environment: Indoor. On a specific scenario.