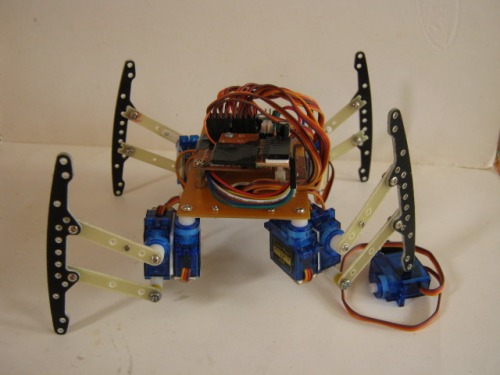
my 1st "servo" walker, my other walkers where BEAM based :) Basically just a hardware upgrade, did not like my 1st build, some hardware issues etc etc..
yup they where ‘bumpers’. just lying in the corner of my parts bin, useless haha so I had to use them… regarding PIC code, not entirely mine, had a friend of mine help me code it. Im still a noobie with Hitech C.
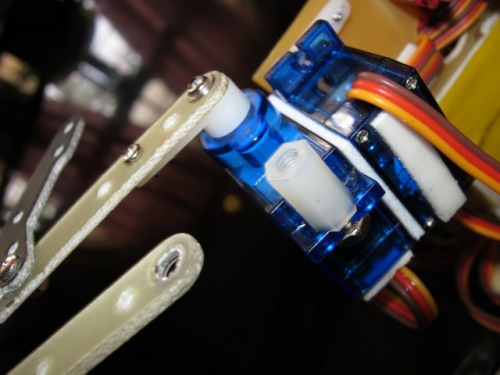
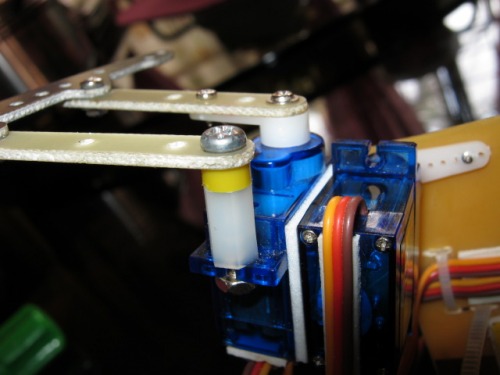
If you look careful, you’ll see that the lower strut is mounted on a bolt and a thick plastic washer or extender in the mounting hole of the up/down servo. Easy and effective. Well done! I can do the same thing with a uServotino board I guess… if I use the mounting holes to mount the pivot servos and I don’t allow the servos to go under the board. Kind of what I wanted to do with the coffee can robot. My problem was that I had the struts too shortand when the legs were up 2 pivot points would align and the leg would be able to rotate freely.
yeah, thats exactly how I did it… im using a nylon spacer/bushing… same height with the servos output shaft/horn… close up pics coming up SOON… kinda busy at the moment.
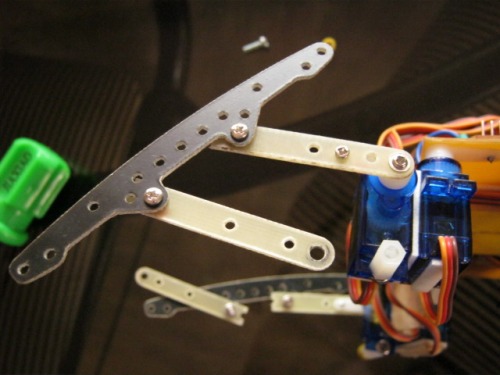
yeah.not parallel.reason? the tamiya bumper/s already had holes in them. really quick fix. plus I was not in the mood to drill holes. If I Did,maybe i’d offset them a bit because my bits here are a bit dull. besides, the hole in those fiber boards are equaly spaced relative to each other.