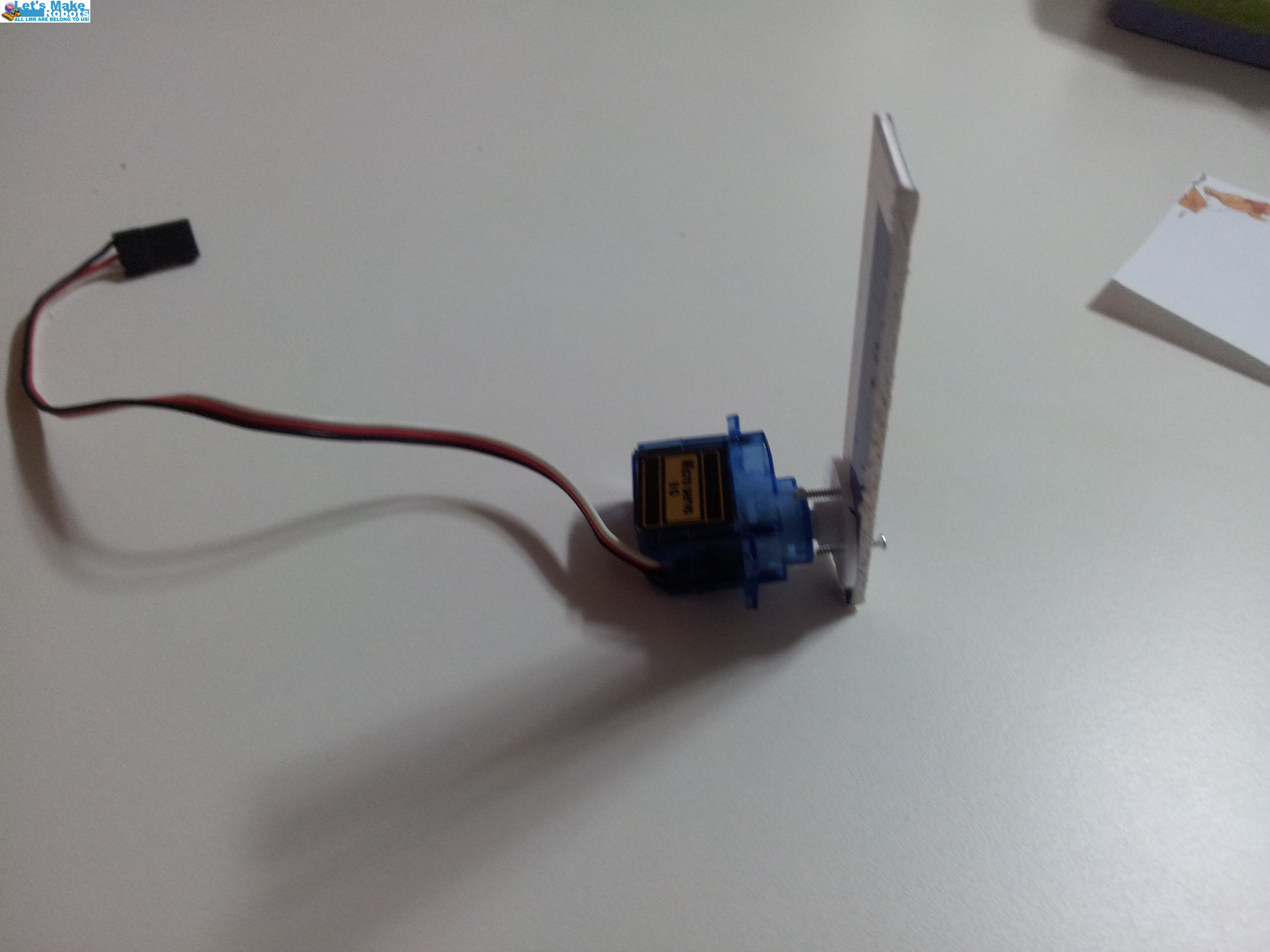
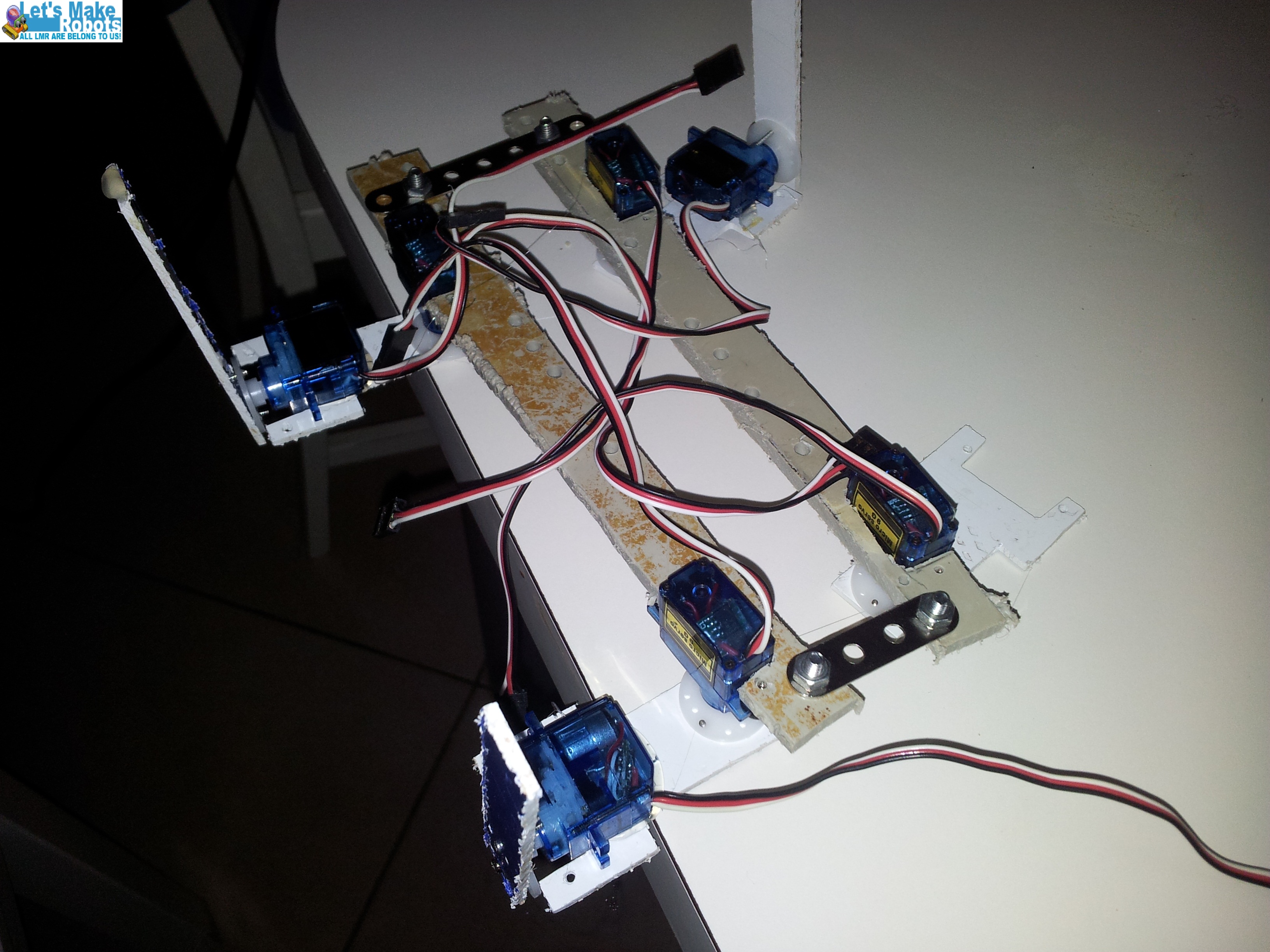
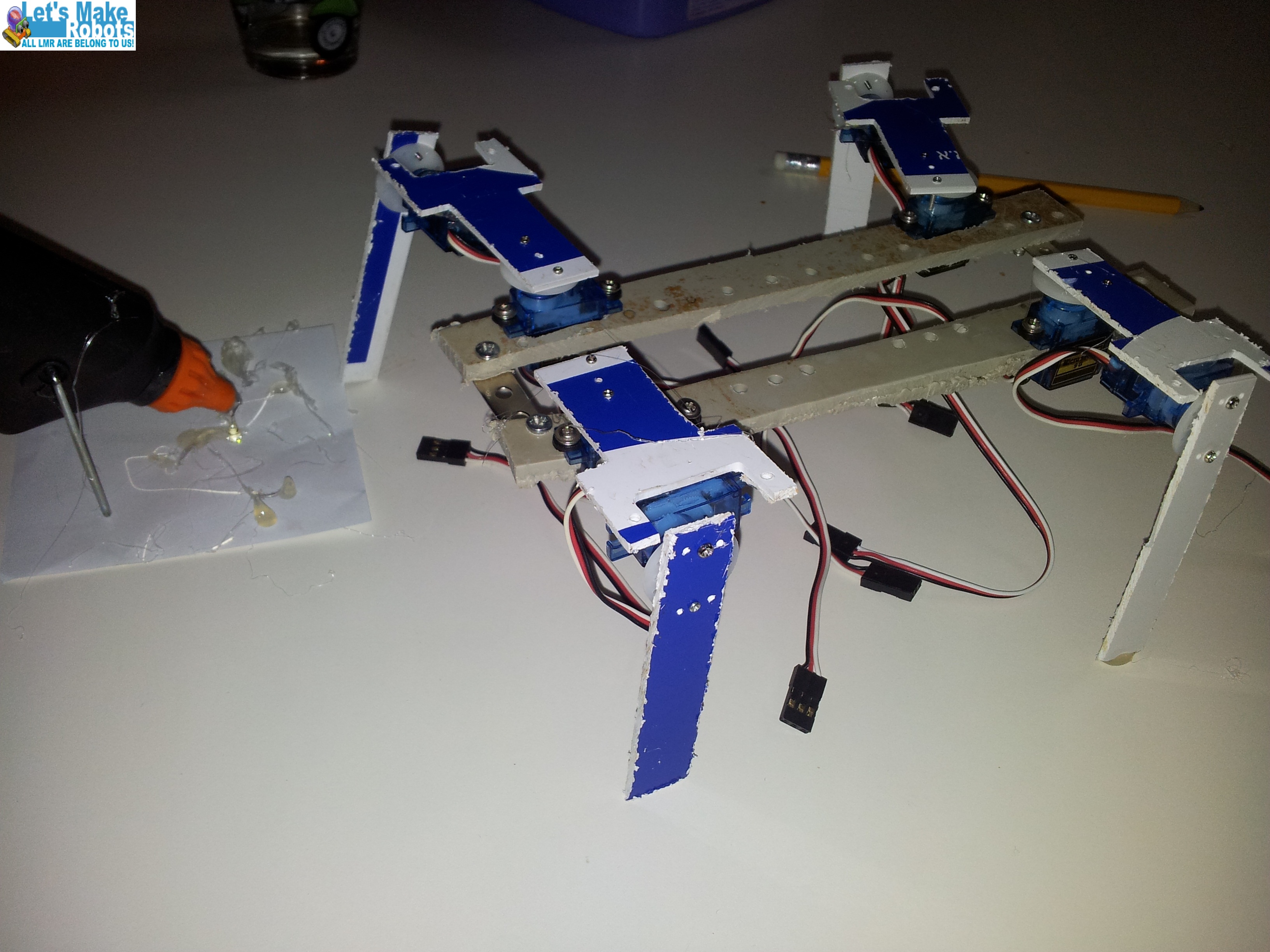
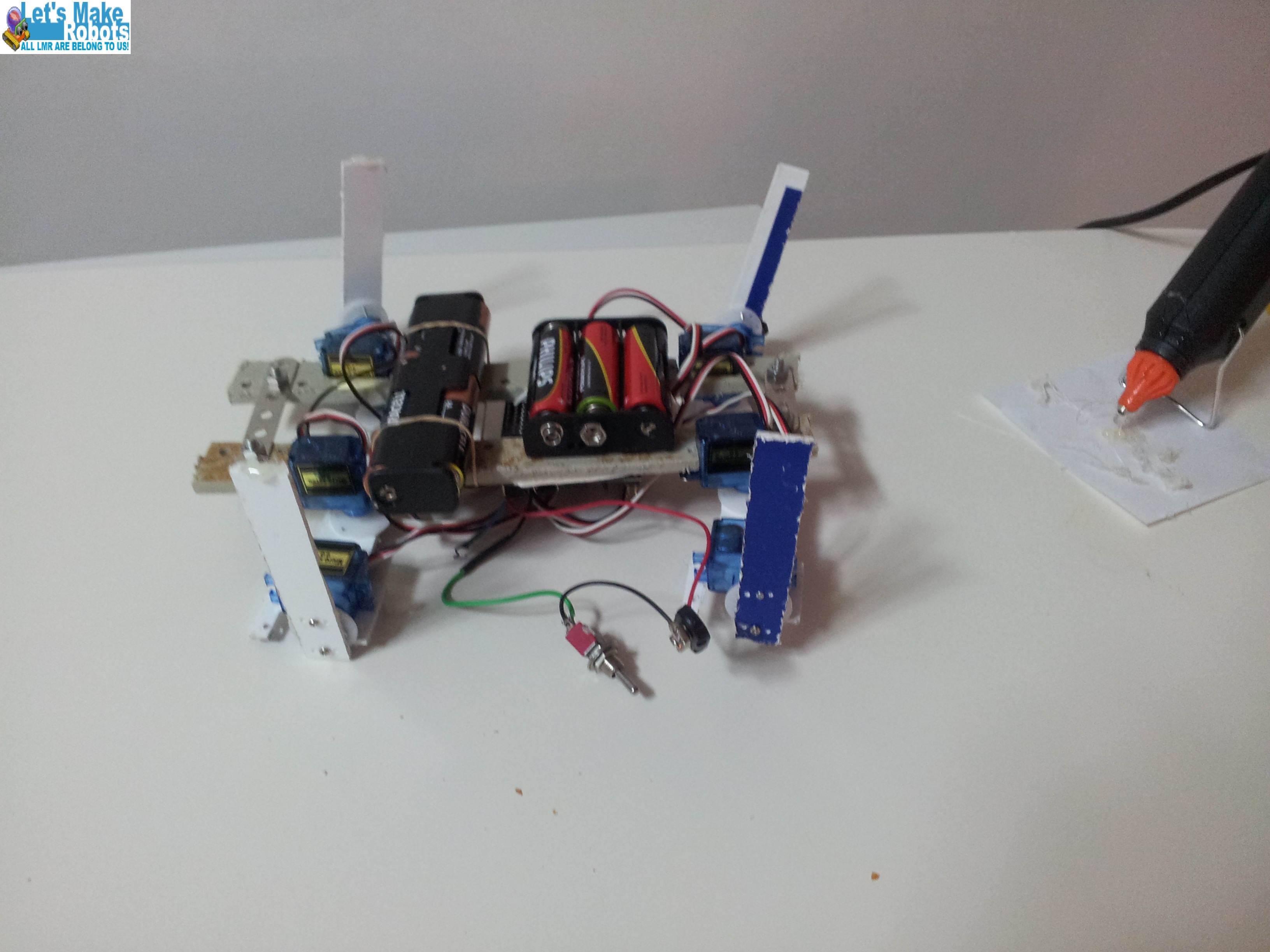
I'm sorry for my bad English, but i hope you'll get the main idea of my project. I'm buillding a 4 leged robot, right now I'm Havig problems with the timing of the legs in order to make it walk. I'm Using 8 micro 9g servos. i still did'nt mount any sensors and i know that it dosent look very Aesthetic but it will be... I need Help:
1. I understand that i can make the Digital Input Pins as a Digital OUTPUT - How do I do that. I used all the digital outputs for the servos and i need more.
2. is there any logic diagram that i can use to write the program that will make it walk?
thanks Vital
Walking, avoiding...
Actuators / output devices: 8 servos
Control method: autonomous
CPU: Picaxe 28x1
Power source: 4.5V for picaxe, 6V for Servos
Programming language: Basic
Sensors / input devices: Sharp IR, 2LDRs (planned)
More servos are not possible with the 28X1 by itself. The servo commands are tied to the output pins; input pins can’t be converted to a servo capable pin. You’d need to add some sort of servo controller to control more than the eight you are already using.
9G servos will burn out our passion for Hexapod robots… You will need better servos, better battery, better material for legs and body… and then you can think about better algorithms…
I am not familiar with Picaxe 28x1 but your project looks promising.
What servos you still want to attach, sensor sweep?
oscar got a point but my personal opinion is that you just go ahead and do whatever is possible with the given parameters.
I am running my Chopstick Junior with 4x AA batteries and it’s fine, so the thing is, you only need better servos, better batteries better material when you NEED it…if your design is working for you then just stick on it.
I tried to use the 9G servos I tried to use the 9G servos for hexapod robot (you can see my first 2 videos of my hexapod robot i posted here). The problem is sometimes it’s so weak, and doesn’t work the way you expect it to, and you are uncertain whether it’s your code, or the servos…
I agree with you Lumi, your Chopstick Junior works quite well. But it’s just so much easier to build a hexapod robot having better equipments and parts. After all not everyone has brilliant robot skills and knowledge like you
By the way, are you still in China? I am going to China in a few months?
I think your walking program is not the problem, but the geomitrey of the legs, you might have better luck alligning the leg lifting servos 90 degrees to what they are now,
also, I encountered some problems with a long rectangular shaped robot like yours is, I found that a square shape works better, just some suggestions.
I understand but I am not an expert.There are guys in Letsmakerobots with better skills than me. I just try to make my way around
I agree with you regarding better parts. My Chopstick Junior already got four servos replaced. I mean that’s a good rate considering that he was tortured by kids and adults all the time he was displayed. Mostly they moved his legs in unnatural positions and pulled them apart. See here :-) https://www.robotshop.com/letsmakerobots/node/30373
The next (if I have the time) will have servos with metal gear to prevent that from happening.
Edit: Dude I just read Zhongshang in your profile. Then you can meet the famous OddBot first and I will come down to you guys to have the LMR dudes meeting complete