


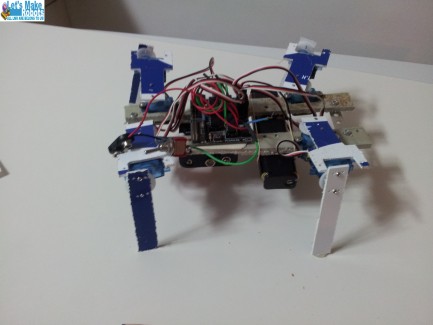
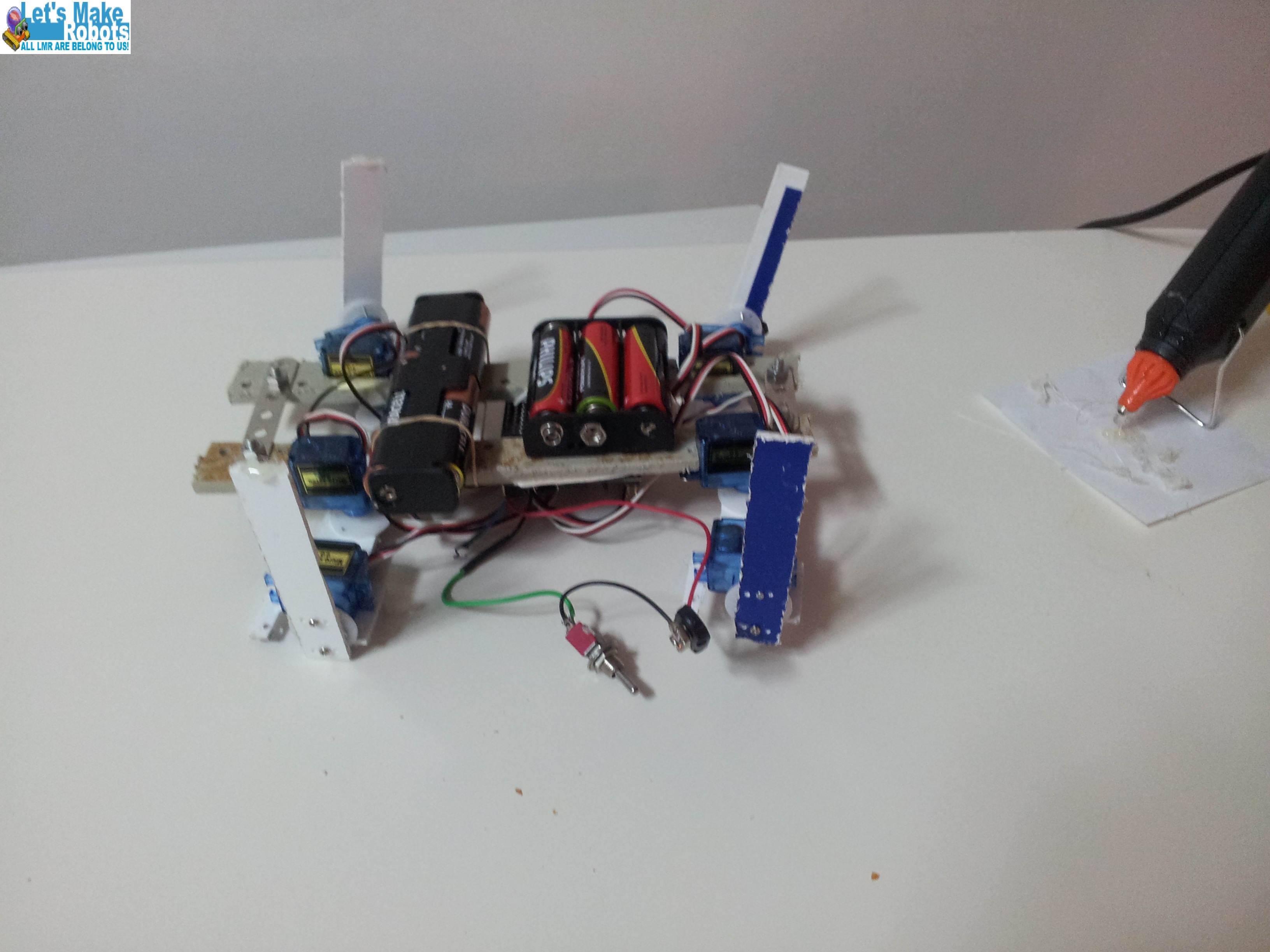
Second robot, First Walker - NoNameBot
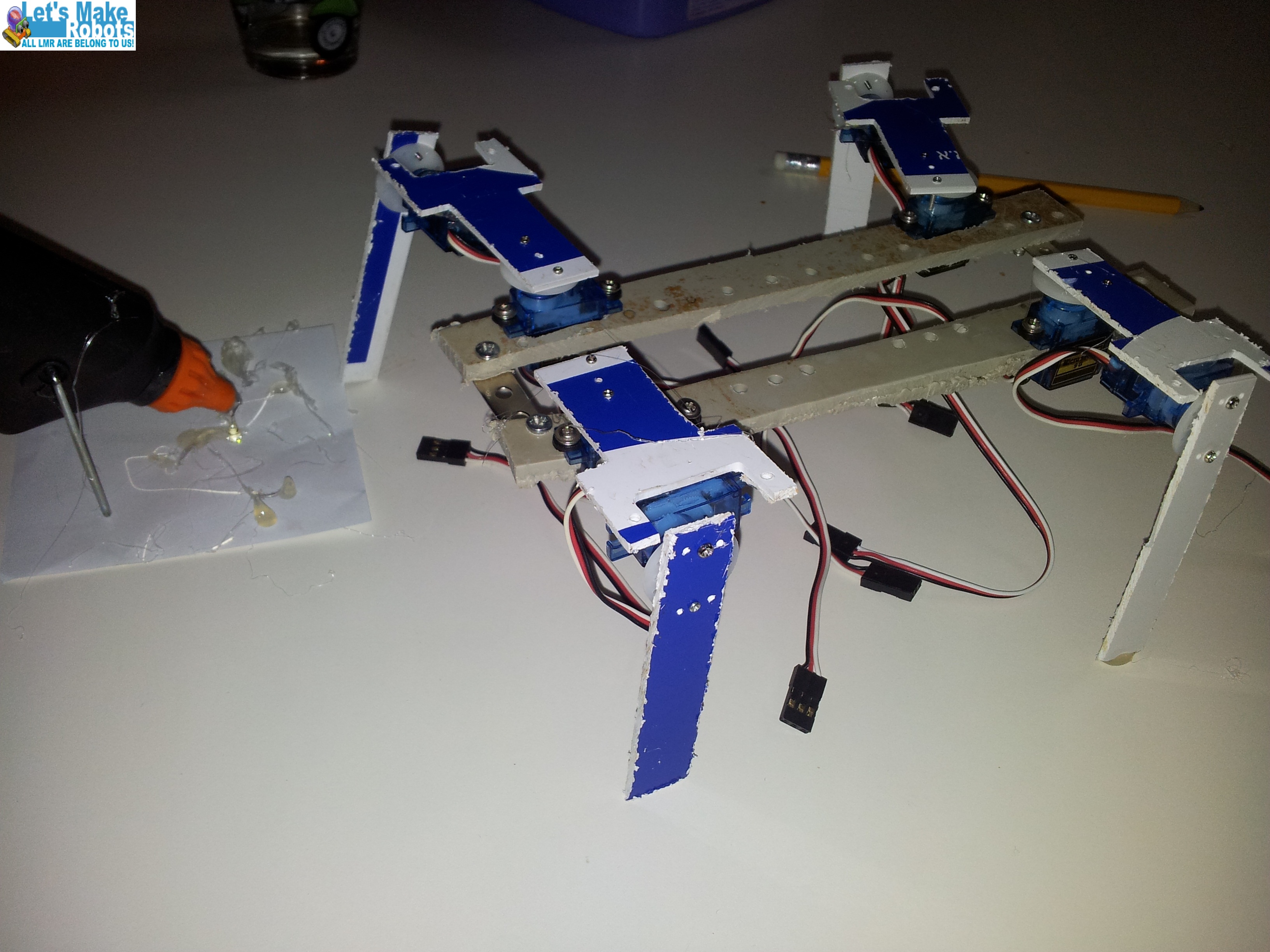
I'm sorry for my bad English, but i hope you'll get the main idea of my project. I'm buillding a 4 leged robot, right now I'm Havig problems with the timing of the legs in order to make it walk. I'm Using 8 micro 9g servos. i still did'nt mount any sensors and i know that it dosent look very Aesthetic but it will be... I need Help:
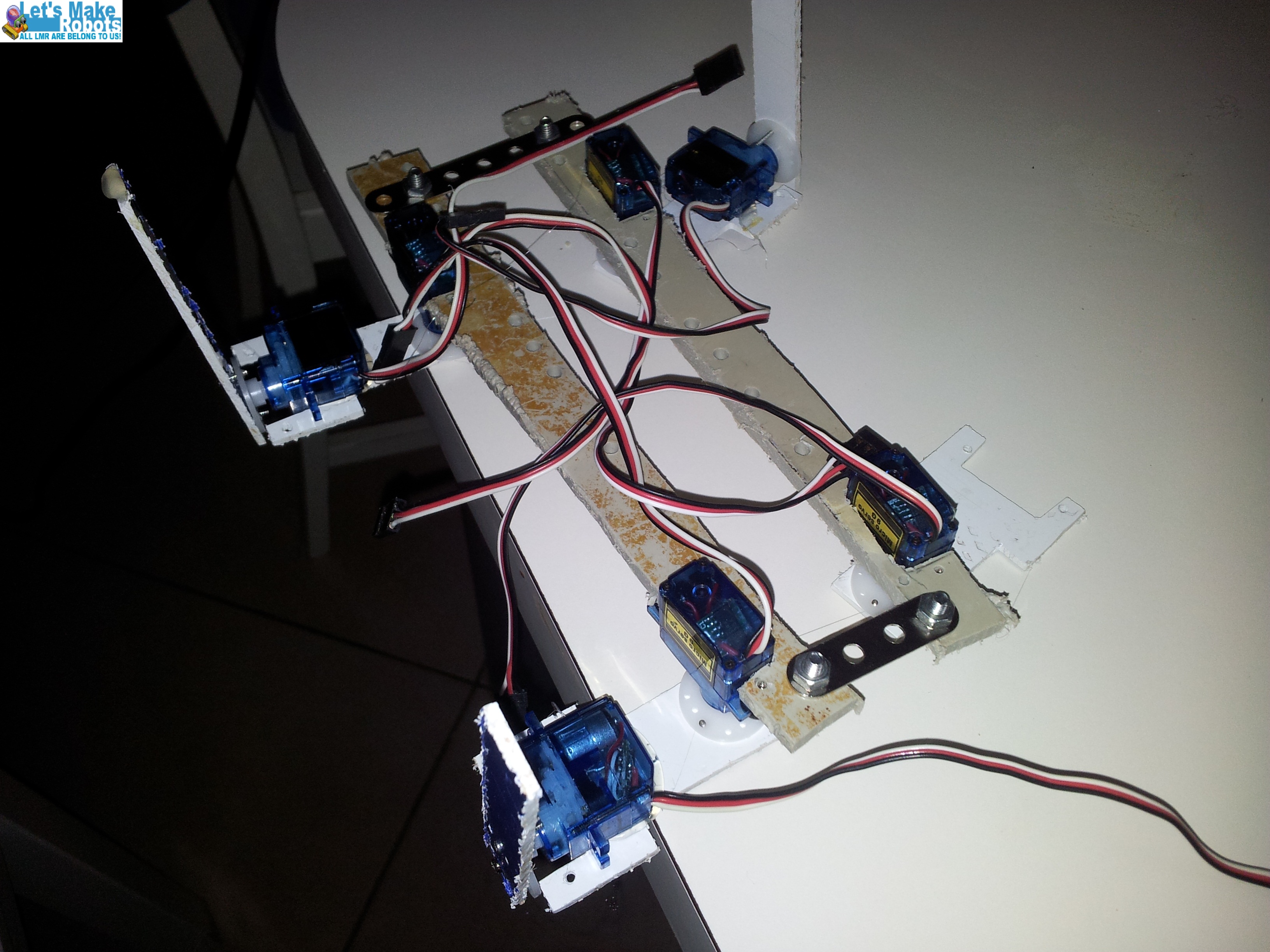
1. I understand that i can make the Digital Input Pins as a Digital OUTPUT - How do I do that. I used all the digital outputs for the servos and i need more.
2. is there any logic diagram that i can use to write the program that will make it walk?
thanks Vital
Walking, avoiding...
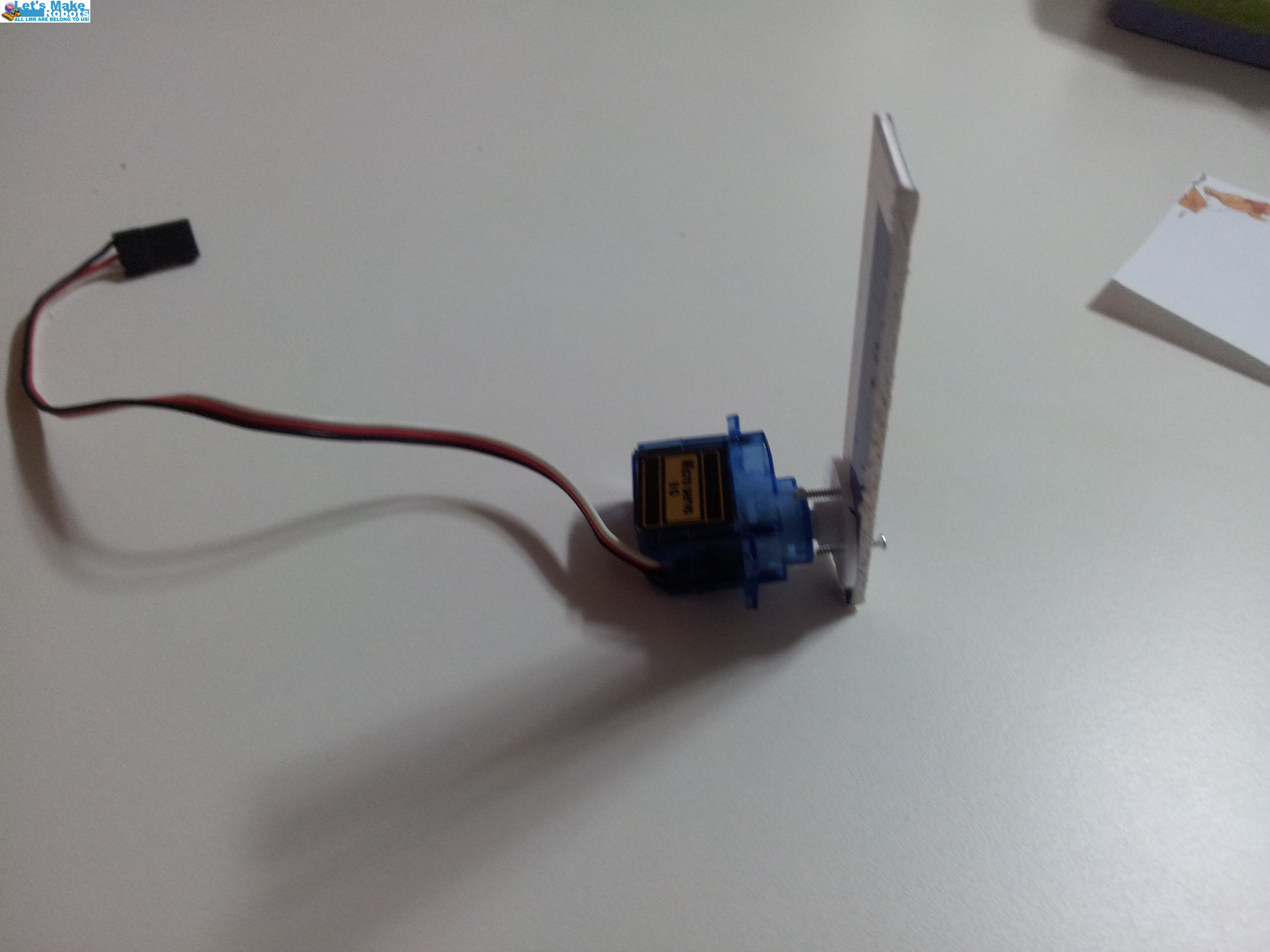
- Actuators / output devices: 8 servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4.5V for picaxe, 6V for Servos
- Programming language: Basic
- Sensors / input devices: Sharp IR, 2LDRs (planned)
- Target environment: home