Long time since I attempted a legged robot. This will be my version of Bostom Dynamics RHex robot.
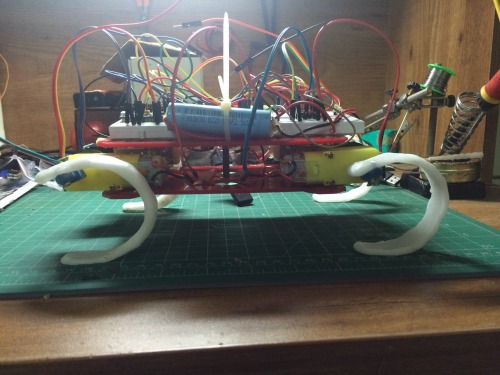
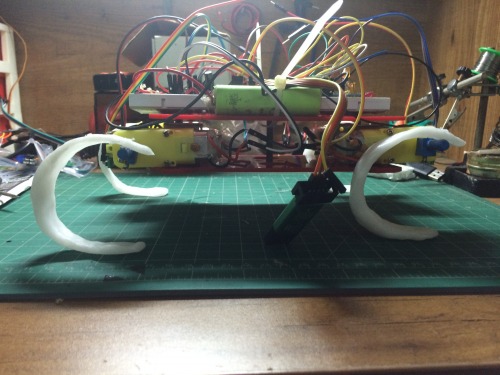
I used polymorph to mould the whegs. My first attempt at moulding the whegs turned out pretty bad (see pics below). The bottom end of 2 whegs weren't as flat as the were supposed to be and also turned out slightly curved and out of alignment. Would using some sort of cast be better ??
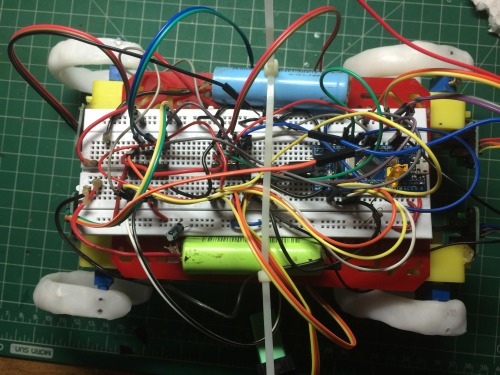
For the controller I used an STM32f103c8t6. I've used 4 dual shaft BO gear motors and 4 HC-020k wheel encoders mounted onto them. Don't have much else to show other than some pictures of the current setup right now. I will update this post with more test videos and much better whegs soon ! :D
Nice work. How does it seem to work in action? Any chance of a video?
Maybe you could use a section of PVC pipe of an appropriate diameter as a form to mold the polymorph around. Or, perhaps just use a thin slice of PVC pipe with a segment cut out as your whegs instead of having to mold it. It would be strong and easily repeatable.
I haven’t reached the point to have a walking test yet :D. Just running the legs individually right now by setting the encoders to interrupts and calculating the rpm value from that. I should have a video up of the leg tests by next week.
The first plan of work would be getting better Whegs!! :D I will defiintely try getting a PVC pipe mold. I had tried to make something like RoverX with polymorph but then just went with the C shaped one.
Nicely done - I remember the Rhex project at McGill - one of the student projects at the time was to make an inexpensive version of the RHex and I think you have them beat!
That site was really useful. I found some good printing hubs in my city I didn’t know of but they’re a bit costly :D. For now I’ll try it with the polymorph but incase it proves to be the wrong material forthe job I’ll go with the 3D printing. Thanks for the link!