



RQuad Robot
Hey guys,
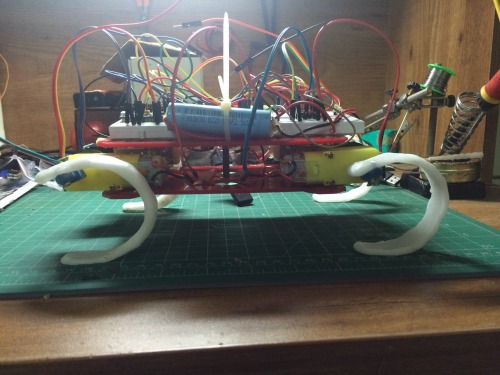
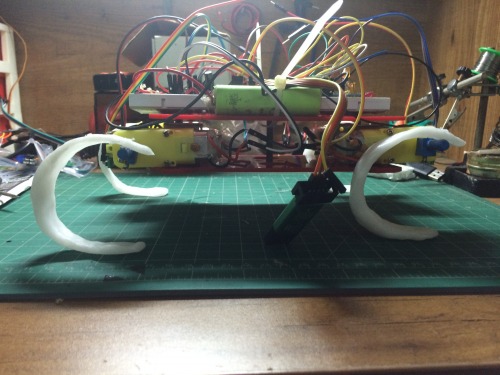
Long time since I attempted a legged robot. This will be my version of Bostom Dynamics RHex robot.
I used polymorph to mould the whegs. My first attempt at moulding the whegs turned out pretty bad (see pics below). The bottom end of 2 whegs weren't as flat as the were supposed to be and also turned out slightly curved and out of alignment. Would using some sort of cast be better ??
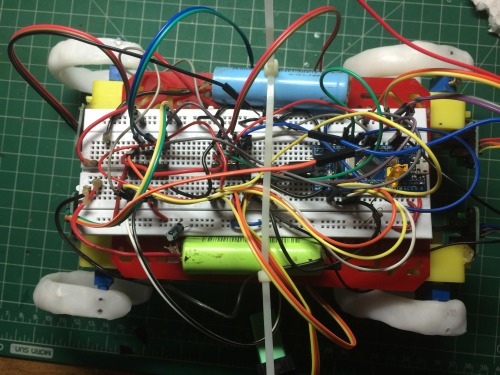
For the controller I used an STM32f103c8t6. I've used 4 dual shaft BO gear motors and 4 HC-020k wheel encoders mounted onto them. Don't have much else to show other than some pictures of the current setup right now. I will update this post with more test videos and much better whegs soon ! :D
Walk around autonomously on any terrain
- Actuators / output devices: BO motors
- Control method: Full autonomous
- CPU: ARM; STM32F
- Power source: 7.4V LiPo 2200mA/H
- Target environment: Wherever it can manage!