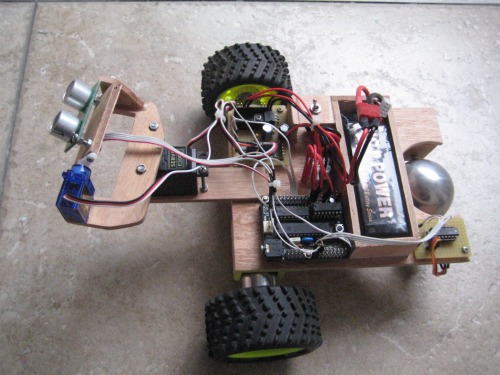
This is actually an experiment. It shall proof that even a very simple designed rover with a simple micro controller, program and sensors is able to drive at least 500m outdoors without getting stuck or destroyed. Maybe I'll make a poll and everybody can guess how far the rover will travel.
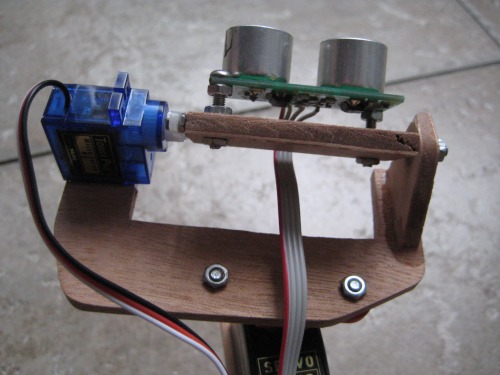
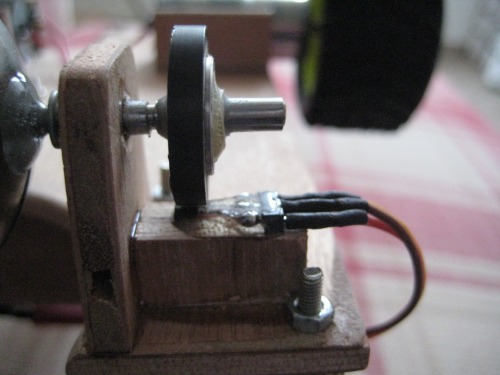
Sor far the rover has only two sensors --- a SRF05 and the rear wheel, a steel ball. On the steel ball axle is a magnetic disc mounted and the roation of the steel ball is monitored by a hall sensor.
The magnetic fields of the disc are so weak, even a M2 nut holds not on it. Just tried a magnet. Holds also not. A bigger problem would be the steel ball, but it is fortunately made from non-magnetic stainless steel
Will you be using the disc connected to the ball to report distance traveled? If so, won’t you be missing out on information when the robot swivels vs traveling in a straight line?
Good question. It could be easily determinated if the rover swivels, so I could re-write the program to count only the traveled distance if both motors turn forward. I have not finally decided if the rover should travel a minimum distance of 500m from point A to B or only 500m, taking also all evasive maneuver into account.
And an interesting test, but a bit wide open… What “kind” of terrain? 500 M on a parking lot would not be a big deal. 500 M in a dense tropical rainforest would be very different. I assume from your previous posts, this is moon related. So, is your terrain a simulated lunar landscape? My wife used to live out in the Malpais of New Mexico, which is very lunar like