



RoverX
This is actually an experiment. It shall proof that even a very simple designed rover with a simple micro controller, program and sensors is able to drive at least 500m outdoors without getting stuck or destroyed. Maybe I'll make a poll and everybody can guess how far the rover will travel.
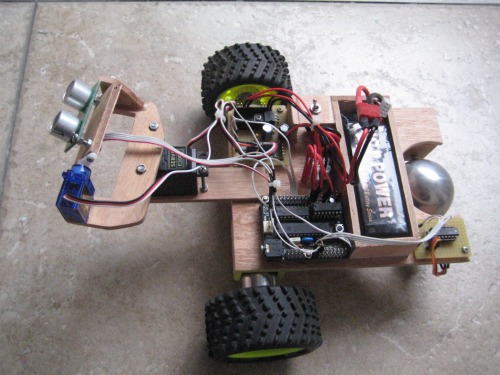
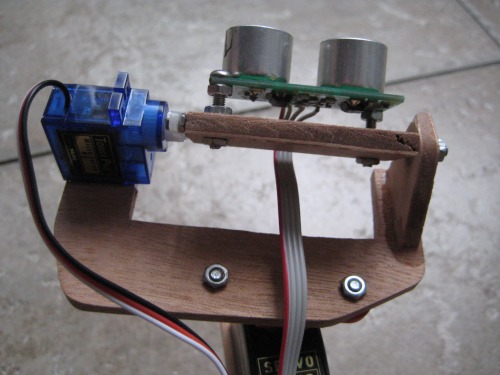

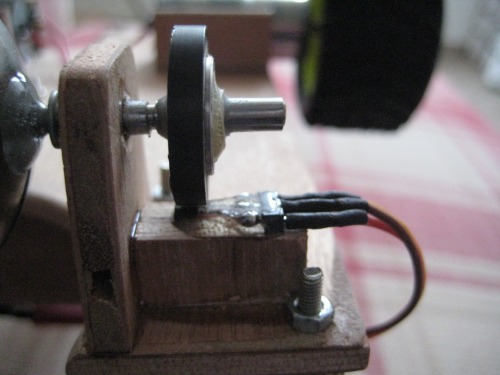
Sor far the rover has only two sensors --- a SRF05 and the rear wheel, a steel ball. On the steel ball axle is a magnetic disc mounted and the roation of the steel ball is monitored by a hall sensor.
TBC
2011.01.24
Added circuit diagram and first test code.
Shall drive at least 500m outdoors
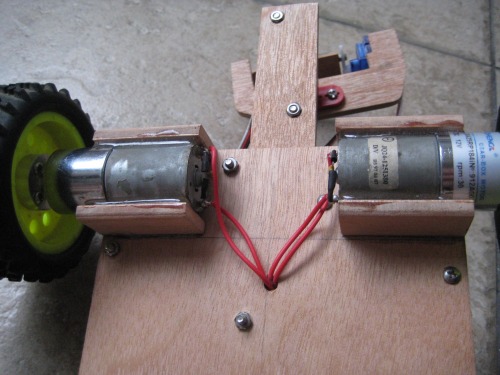
- Actuators / output devices: 2 servos, 2 geared motors
- Control method: autonomous
- CPU: Picaxe 28X-1
- Power source: 11.1 V/2200 mAh Li-Po
- Programming language: Basic
- Sensors / input devices: SRF05, hall sensor
- Target environment: outdoor