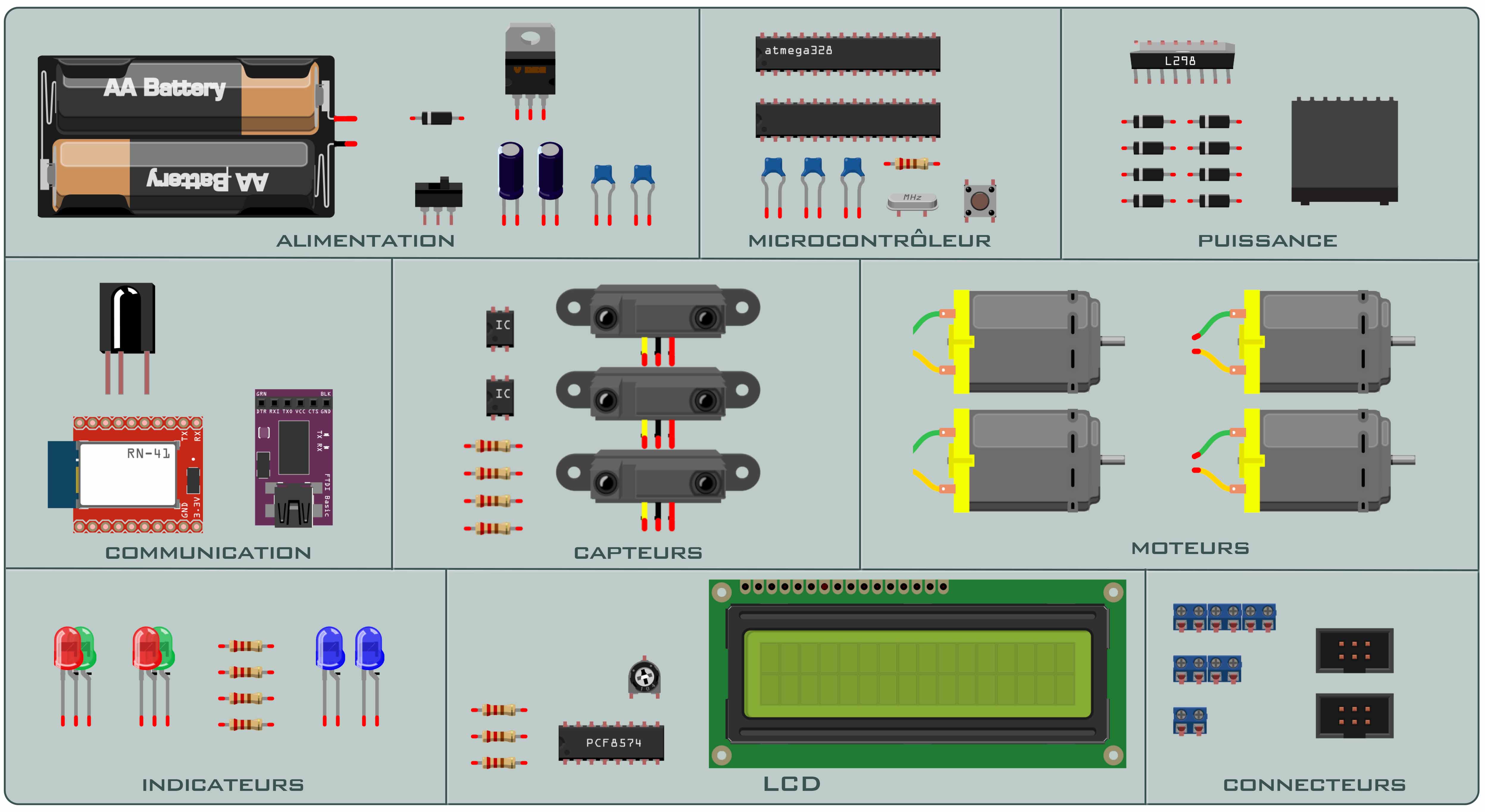
— Composants list —
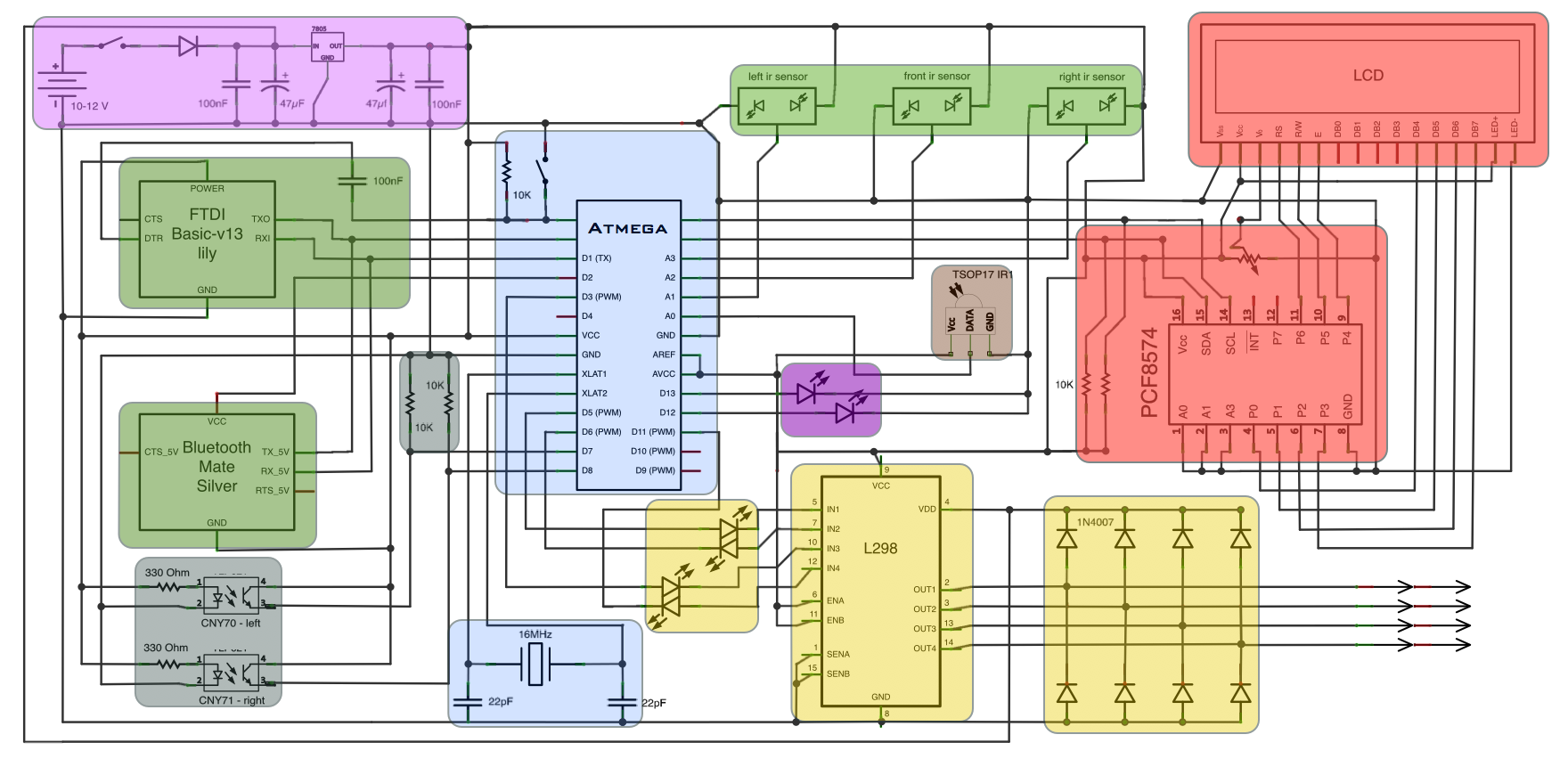
— Global schema —

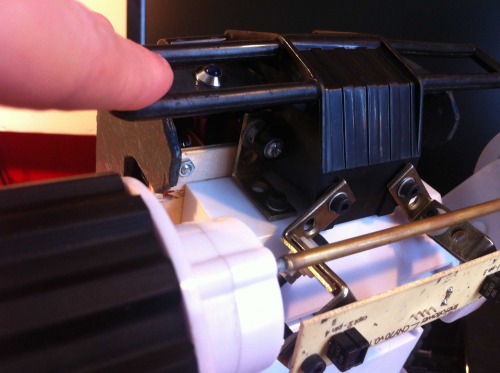
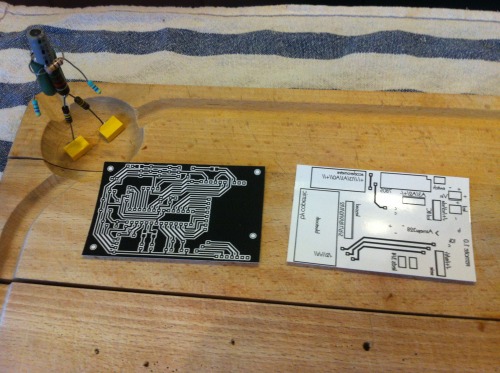
— Result —
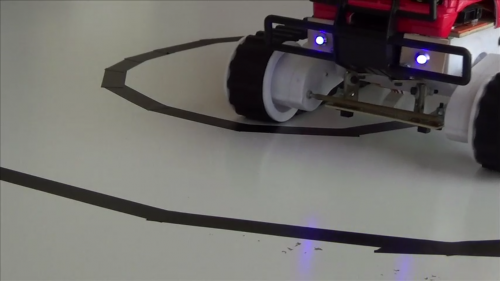
— Line Followr mode —
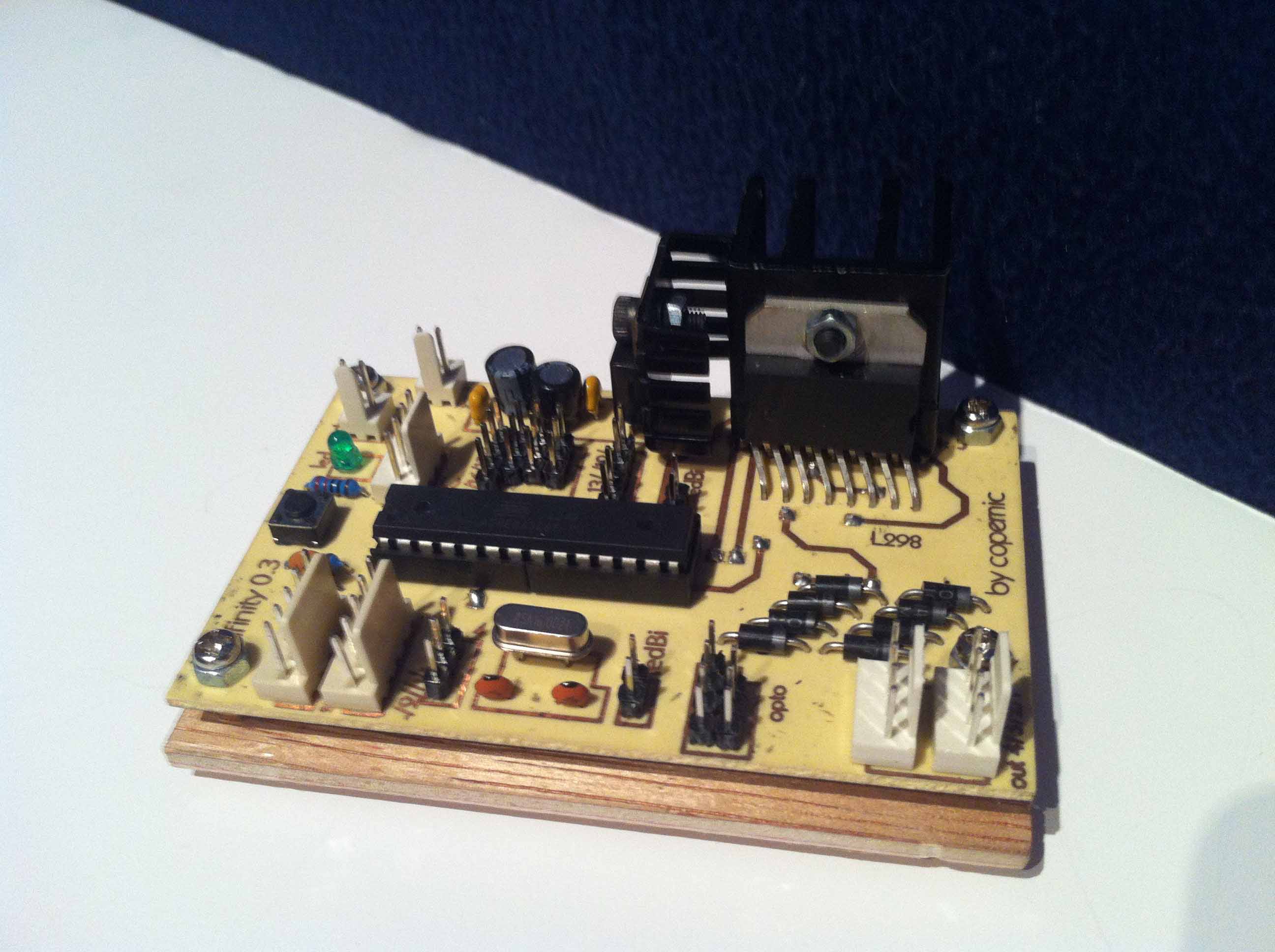
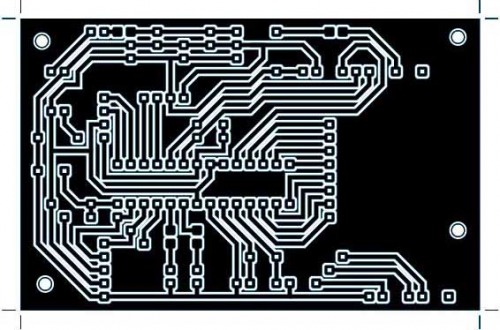
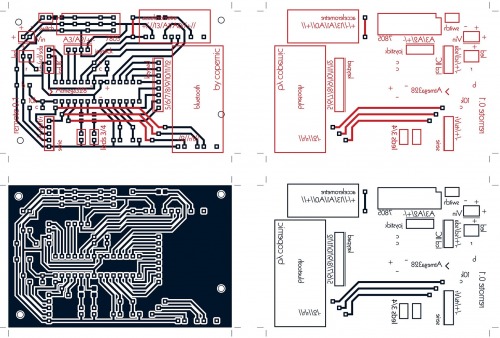
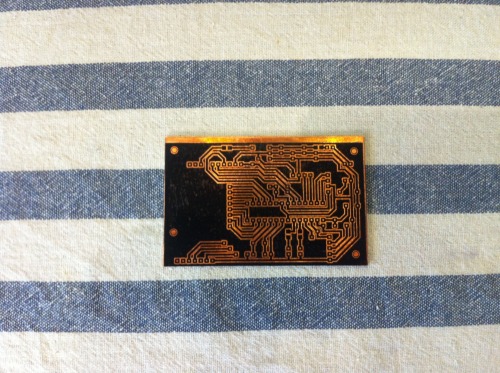
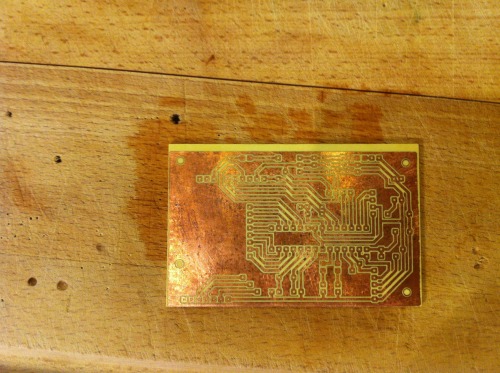
— 'homemade' PCB —
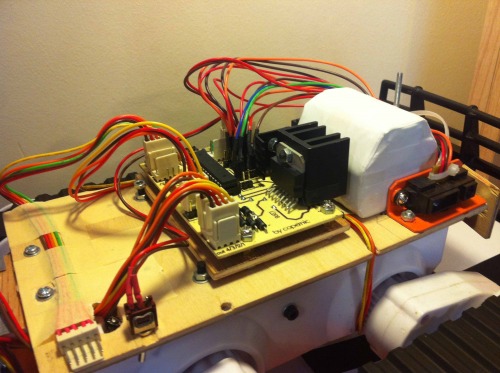
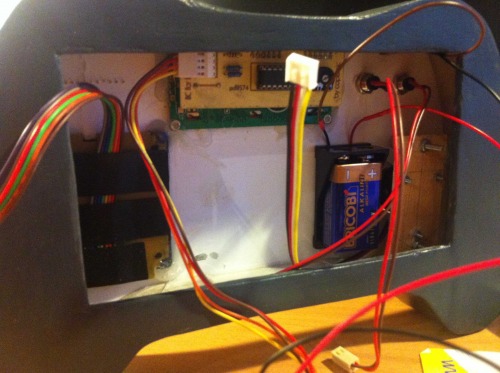
— Rover —
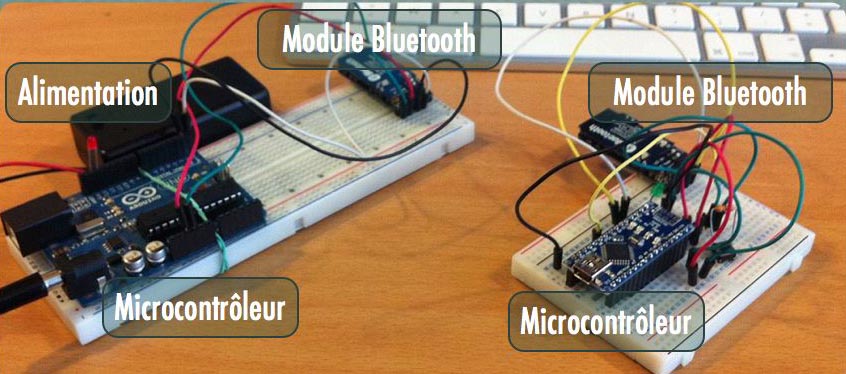
— Bluetooth modules —

— Graphic interface —

— Rover —
MORE PICTURES




UPDATE: WORK IN PROGRESS — TELECOMMANDE (JOYSTICK, CLAVIER & ACCELEROMETRE)



UPDATE — TELECOMMANDE (JOYSTICK, CLAVIER & ACCELEROMETRE)






UPDATE (2013|11|15)
PCB — RS232 REMOTE CONTROL

NEXT STEP: VIDEOS
More to: www.leblogdecopernic.net
Rover infinity 1.0
- Control method: undefined
- Operating system: undefined
- Power source: 9.6V 1500 mA/h
- Programming language: C++ (Arduino)
- Sensors / input devices: IR, Optocoupleurs
- Target environment: Indoor or outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/rover-infinity-1-0
wowwww !!!I read your blog
wowwww !!!
I read your blog and I think its a mine for beginner !!!
J’ai lu ton blog, ton etude est a tutoriel extraordinaire pour faire un premier robot. Je ne sais pas si tu as fais ca par plaisir ou pour tes etudes, mais ton travail est digne d’une These.
Chapeau bas, je vais relire ca encore, car tu me donnes des idees pour continuer mon robot.
vas-tu continuer le
vas-tu continuer le developpement de ce robot ?
UPDATE
Bluetooth remote and Pictures
update
more picutres and new 'remote control’
enjoy
Thank you so much :-)La base
Thank you so much 
La base du projet est effectivement scolaire… Mais bon, ensuite on passionné ou on ne l’est pas LOL…
J’espère que mon blog pourra un peu t’aider
A bientot pour la suite et bonne realisation…