Thought about how the robot should get rid of the parachute after landing without a complicate mechanism and came up with this solution:
Quite simple: A hook made of resistance wire heats up after landing and cut the parachute lines.
2011.2.14
First testing video on different surfaces is up.
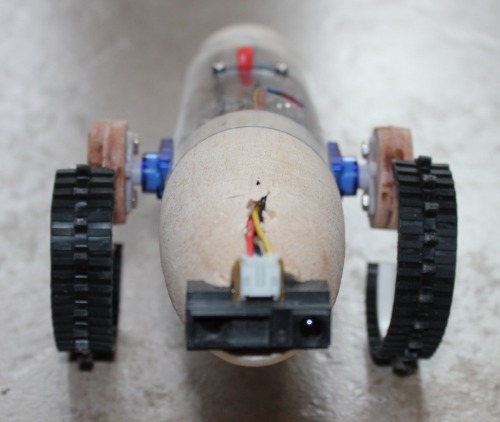
Followed by my blog here and by the great input from GroG and arbarnhart, I started this new robot project. RoRo is a small and light Rhex robot. It will be launched by a sky observer V2 rocket and navigates around via Sharp distance sensor once landed at the desired area.
I've added a tilt switch, so the robot can determinate on which side it is landed. The rotational direction of the motors will be changed then accordingly (otherwise the robot would always travel backwards when landed on the bottom side). If the robot lands on one of the paddle leg sides, it tips over automatically to the bottom side or to the upside as soon as the motors start to turn.
Launched via rocket, navigates around at desired area
Great work Markus, I always Great work Markus, I always enjoy seeing your latest robots especially because your robots are so prolific!
You might want to try turning the paddle legs around the other way. Currently as it is, the pointy end of the paddles might get looped into something as it drives forward.
I thought about the paddle leg configuration. The problem is that the robot might land on the wrong side up
If the robot land on the paddle leg side, it will turn automatically to the right position. Tested it several times. This is really amazing. I thought I would need a third servo to turn it in case. Will make a video tomorrow.
I didn’t even think about the eccentric rotation making it inherently self righting. I wondered what would have happenned to the bot in the video in the other thread if it had toppled. It came really close one time, but the next spin of the leg-wheel did a pretty aggressive correction. The dynamics are different though, since that one isn’t a crawler.
I like this a lot. I may have to look into getting some of those leg-wheels. Did you make them or buy them?
I made the legs by myself, cutting rings from a PVC pipe, heating them with a hot air gun to bring them in form, then glueing old ruber tank tracks on it.
So are you going to put the springs in a groove, your diagrams look like you will launch with them curled. Or are you counting on the velocity of the airflow during launch to stretch them out?
I still feel that ezekiel181 has a good point. The current configuration might lead to the wheels getting snagged by something. How about mounting them the other way around. An on startup rotating them the opposite direction to get the bot the right way up and then move forward?
Geir - read the bit about it adsjusting to which way is up. If I read it right, there is only a 50% chance it will be rolling them that way. Is it worth the chance of a snag to eliminate need for an addtion servo or motor? Tough call.