


RoRo
2011.2.23
Thought about how the robot should get rid of the parachute after landing without a complicate mechanism and came up with this solution:
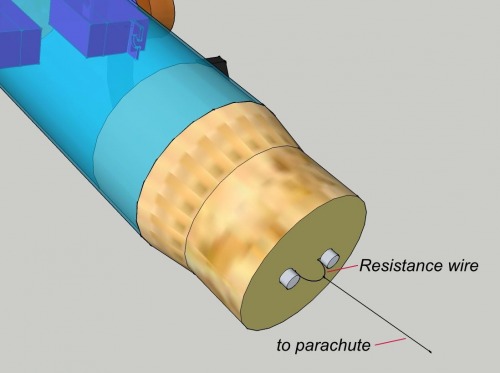
Quite simple: A hook made of resistance wire heats up after landing and cut the parachute lines.
2011.2.14
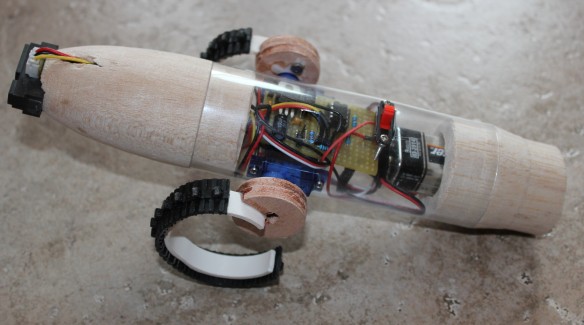
First testing video on different surfaces is up.
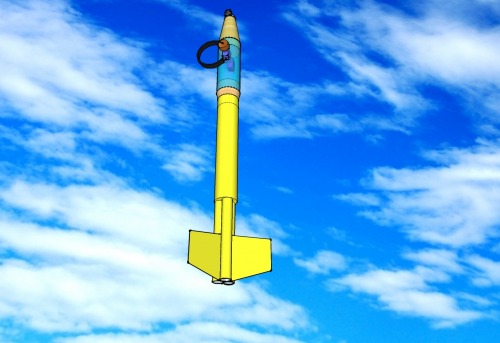
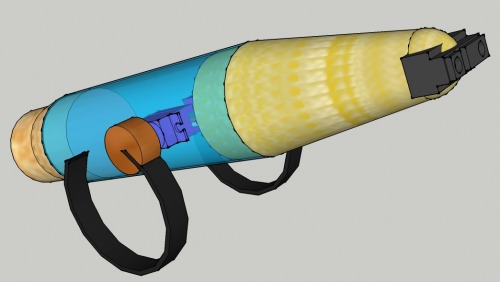
Followed by my blog here and by the great input from GroG and arbarnhart, I started this new robot project. RoRo is a small and light Rhex robot. It will be launched by a sky observer V2 rocket and navigates around via Sharp distance sensor once landed at the desired area.


2011.2.13
This is the circuit diagram of RoRo:
I've added a tilt switch, so the robot can determinate on which side it is landed. The rotational direction of the motors will be changed then accordingly (otherwise the robot would always travel backwards when landed on the bottom side). If the robot lands on one of the paddle leg sides, it tips over automatically to the bottom side or to the upside as soon as the motors start to turn.
Launched via rocket, navigates around at desired area
- Actuators / output devices: 2 continious rotating servos
- Control method: autonomous
- CPU: picaxe 08M
- Power source: 9v battery
- Programming language: Basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: outdoor