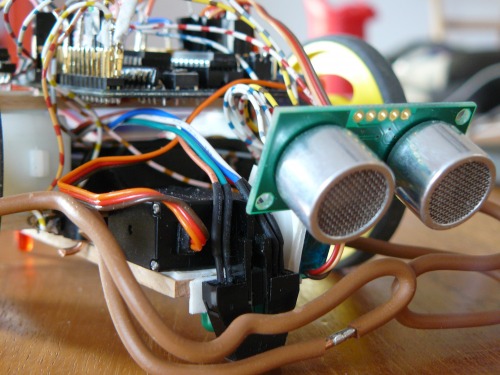
The Robotwo is inspired by fritsl "how to make your first robot". My goal is to let the robot drive around my living room without any human interfering. However my living room being a bit of mess sometimes thats not so easy. Robotwo uses 2 switches configured as a bumber, and the ultrasonic sensors SRF05. The SRF05 is mounted on 2 servos so the sensor can look horizontal and vertical.
Realy does well in obstacle avoidance. The look down was pretty cool, how are you detecting when to check for a low object? Motor current? Very well thought out.
Detects a candle flame at a range 2 metres (6ft) and is unaffected by ambient light! Detect Human Body heat! Servo control for image construction!
Voltage - 5v only required Current - 5mA Typ. excluding servo Temperature Range - 4°C - 100°C Accuracy (Full FOV) - +/-2°C +/-2% from 10°C to 100°C, Accuracy (Full FOV) - +/-3°C from 4°C to 10°C Field of View - 41° x 6° (8 pixels of approx. 5° x 6°) Outputs - 1 ambient + 8 pixel temperatures Communication - I2C Interface Servo - Controls servo in 32 steps to 180° rotation Small Size - 31mm x 18mm
Wow, what a first robot!! Wow, what a first robot!! I made mine with Fritsl’s instructable too, but I still haven’t got it navigating as well as yours! I can’t wait to see your next improvement.


 Thanks for
Thanks for